An Overview of Model Compression and Acceleration

An Overview of Model Compression and Acceleration

iResearch666
发布于 2023-09-13 13:53:44
发布于 2023-09-13 13:53:44
An Overview of Model Compression and Acceleration Author:Jet Date:2023/07
Background
- 减少模型存储和计算成本
- 期望模型不仅能部署在服务端GPU,也能部署在移动端
- 神经网络中卷积层、全连接层权重参数具有冗余的特点 卷积层占据了大约 90-95% 的计算时间和参数规模,有较大的值;全连接层占据了大约 5-10% 的计算时间,95% 的参数规模,并且值较小
Related work
综合现有的深度模型压缩方法,它们主要分为四类:
- 参数剪枝和共享(parameter pruning and sharing)
- 针对模型参数的冗余性,试图去除冗余和不重要的项
- 低秩因子分解(low-rank factorization)
- 使用矩阵/张量分解来估计深度学习模型的信息参数
- 转移/紧凑卷积滤波器(transferred/compact convolutional filters)
- 特殊的结构卷积滤波器来降低存储和计算复杂度
- 知识蒸馏(knowledge distillation)
- 训练一个更紧凑的神经网络来重现一个更大的网络的输出
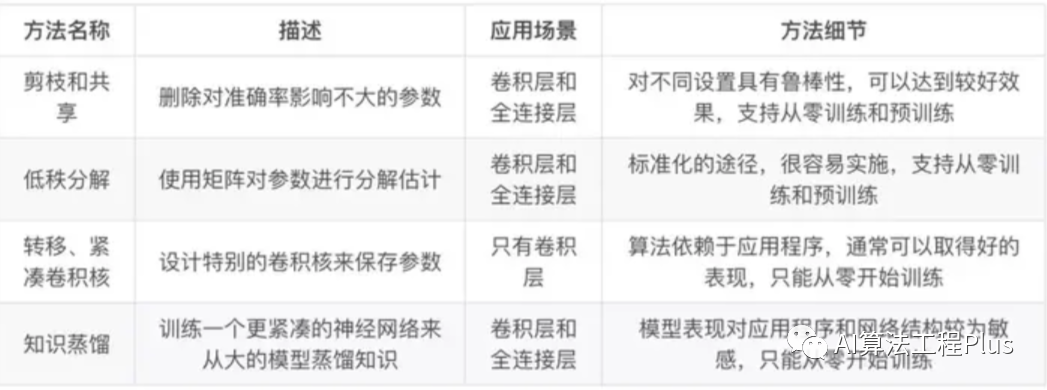
image-20230727150746346
一般来说,参数修剪和共享,低秩分解和知识蒸馏方法可以用于全连接层和卷积层的 CNN,但另一方面,使用转移/紧凑型卷积核的方法仅支持卷积层。低秩因子分解和基于转换/紧凑型卷积核的方法提供了一个端到端的流水线,可以很容易地在 CPU/GPU 环境中实现。相反参数修剪和共享使用不同的方法,如矢量量化,二进制编码和稀疏约束来执行任务,这导致常需要几个步骤才能达到目标。
基于参数修剪/共享、低秩分解的模型可以从预训练模型或者从头开始训练,因此灵活而有效。然而转移/紧凑的卷积核和知识蒸馏模型只能支持从零开始训练。
参数修剪和共享
三类:模型量化和二进制化、参数共享和结构化矩阵(structural matrix)
- 网络量化(quantization)通过减少表示每个权重所需的比特数来压缩原始网络:fp32 fp16 int8 int4
- 修剪减少了需要编码的权重数量,量化和霍夫曼编码减少了用于对每个权重编码的比特数。对于大部分元素为 0 的矩阵可以使用稀疏表示,进一步降低空间冗余,且这种压缩机制不会带来任何准确率损失。
- 剪枝:

image-20230727145531991
低秩分解和稀疏性
典型的 CNN 卷积核是一个 4D 张量,而全连接层也可以当成一个 2D 矩阵,低秩分解同样可行。这些张量中可能存在大量的冗余。所有近似过程都是逐层进行的,在一个层经过低秩滤波器近似之后,该层的参数就被固定了,而之前的层已经用一种重构误差标准(reconstruction error criterion)微调过。
迁移/压缩卷积滤波器
在 Inception 结构中使用了将 3×3 卷积分解成两个 1×1 的卷积;SqueezeNet 提出用 1×1 卷积来代替 3×3 卷积,与 AlexNet 相比,SqueezeNet 创建了一个紧凑的神经网络,参数少了 50 倍,准确度相当。
知识蒸馏
“学生-教师”的范式,即通过软化“教师”的输出而惩罚“学生”
只能用于具有 Softmax 损失函数分类任务
TensorFlow 支持的是一种静态图,当模型的参数确定之后,便无法继续修改。这对于逐阶段、分层的训练带来了一定的困难。相比之下,Pytorch 使用了动态图,在定义完模型之后还可以边训练边修改其参数,具有很高的灵活性。这也是深度学习未来的发展方向
YOLOv6
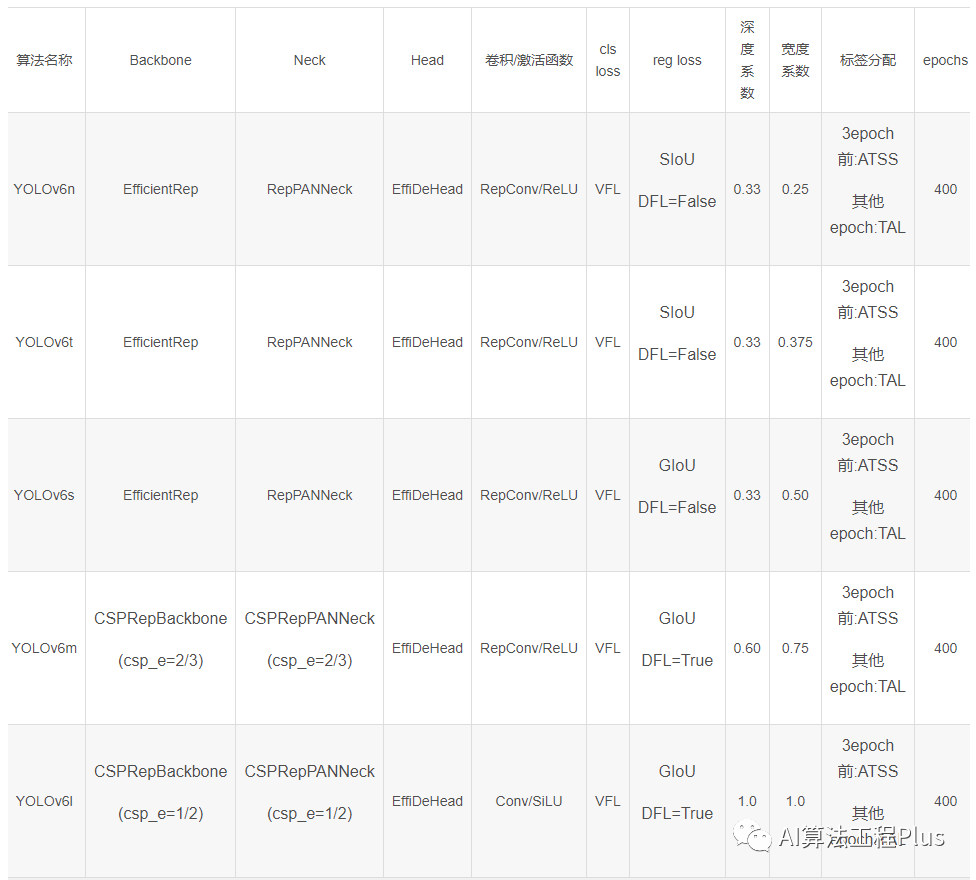
image-20230731114838134
EfficientRep Backbone
- 多分支的网络(ResNet,DenseNet,GoogLeNet)相比单分支(ImageNet,VGG)的通常能够有更好的分类性能。但是,它通常伴随着并行性的降低,并导致推理延迟的增加。相反,像VGG这样的普通单路径网络具有高并行性和较少内存占用的优点,从而导致更高的推理效率。
- RepVGG Style 结构是一种在训练时具有多分支拓扑,而在实际部署时可以等效融合为单个 3x3 卷积的一种可重参数化的结构。通过融合成的 3x3 卷积结构,可以有效利用计算密集型硬件计算能力(比如 GPU),同时也可获得 GPU/CPU 上已经高度优化的 NVIDIA cuDNN 和 Intel MKL 编译框架的帮助。
Rep-PAN neck
- 将YOLOv5中使用的 CSPBlock替换为RepBlock(适用于小型模型)或CSPStackRep Block(用于大型模型),并相应调整宽度和深度。
Decoupled Head
- 原始 YOLOv5 的检测头是通过分类和回归分支融合共享的方式来实现的,而 YOLOX 的检测头则是将分类和回归分支进行解耦,同时新增了两个额外的 3x3 的卷积层,虽然提升了检测精度,但一定程度上增加了网络延时。
- 因此,我们对解耦头进行了精简设计,同时综合考虑到相关算子表征能力和硬件上计算开销这两者的平衡,采用 Hybrid Channels 策略重新设计了一个更高效的解耦头结构,在维持精度的同时降低了延时,缓解了解耦头中 3x3 卷积带来的额外延时开销。通过在 nano 尺寸模型上进行消融实验,对比相同通道数的解耦头结构,精度提升 0.2% AP 的同时,速度提升6.8%。
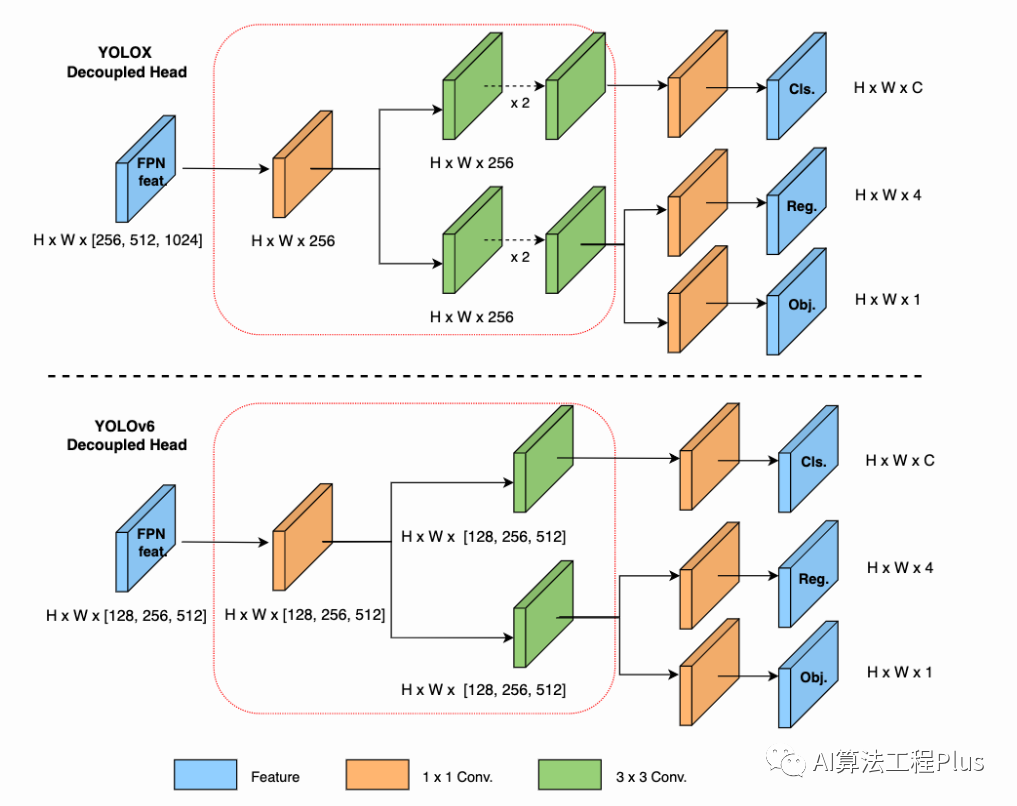
image-20230731103229622
Training strategies
Anchor-free
- 由于 Anchor-based检测器需要在训练之前进行聚类分析以确定最佳 Anchor 集合,这会一定程度提高检测器的复杂度;同时,在一些边缘端的应用中,需要在硬件之间搬运大量检测结果的步骤,也会带来额外的延时。而 Anchor-free 无锚范式因其泛化能力强,解码逻辑更简单,在近几年中应用比较广泛。经过对 Anchor-free 的实验调研,我们发现,相较于Anchor-based 检测器的复杂度而带来的额外延时,Anchor-free 检测器在速度上有51%的提升。有两种类型的anchor-free检测器:point-based(YOLOX,FCOS)和keypoing-based(CenterNet)。在YOLOv6中,采用了 anchor-free point-based范式。
TAL
- OTA将目标检测中的标签分配视为最佳传输的问题。它从全局角度定义了每个GT目标的正/负训练样本。SimOTA是OTA的简化版本,它减少了额外的超参数并保持了性能。在YOLOv6的早期版本中,SimOTA被用作标签分配方法。然而,在实践中,发现引入SimOTA会减缓训练过程。而且,陷入不稳定训练的情况经常出现。因此,设计了一个 SimOTA的替代品TAL。
- Task alignment learning:任务对齐学习(TAL),TOOD: Task-aligned One-stage Object Detection任务对齐的单阶段目标检测。由于分类和定位的学习机制不同,两个任务学习到的特征的空间分布可能不同,当使用两个单独的分支进行预测时,会导致一定程度的错位。增加两个任务之间的交互,(2)增强检测器学习比对的能力
Activation
- YOLO系列激活函数各不相同,如ReLU、LReLU、Swish、SiLU、Mish等。在这些激活函数中,SiLU是使用最多的。一般来说,SiLU的精度更高,不会造成太多额外的计算成本。然而,在工业应用中,特别是在部署具有TensorRT加速的模型时,ReLU具有更大的速度优势,因为它融合到了卷积中。
- 此外,进一步验证了RepConv/普通卷积(表示为Conv)和ReLU/SiLU/LReLU组合在不同大小网络中的有效性,以实现更好的折衷。带有SiLU的Conv在精度上表现最佳, 而RepConv和ReLU的组合实现了更好的权衡。所以建议用户在对延迟敏感的应用程序中使用RepConv和ReLU。
- 使用RepConv/ReLU在YOLOv6-N/T/S/M中,用于更高的推理速度;在大型型号 YOLOv6-L中使用Conv/SiLU组合加速训练并提高性能
Loss
- Classification Loss
- 在YOLOv6-N/S/M上实验了Focal Los、Polyloss、QFL和VFL。如表8所示,与Focal Loss相比,VFL对YOLOv6-N/S/M分别带来0.2%/0.3%/0.1%的AP改善。所以,选择 VFL作为分类损失函数
- Focal Loss修改了传统的交叉熵损失,以解决正负样本或难易样本之间的类不平衡问题。为了解决训练和推理之间质量估计和分类的不一致使用,Quality Focal Loss(QFL)进一步扩展了Focal Loss,将分类分数和本地化质量联合表示用于分类监督。而VariFocal Loss(VFL)源于Focal Loss,但它不对称地处理正样本和负样本。通过考虑不同重要程度的正样本和负样本,它平衡了来自两个样本的学习信号。Poly Loss将常用的分类损失分解为一系列加权多项式基。它在不同的任务和数据集上调整多项式系数,通过实验证明其优于交叉熵损失和Focal Loss
- Box Regression Loss
框回归损失为精确定位边界盒提供了重要的学习信号。L1 Loss是早期工作中的原始框回归损失。逐渐地,各种精心设计的框回归损失如IoU系列Loss和Probability Loss如雨后春笋般涌现。
- IoU-series Loss: IoU Loss将预测框的四个边界作为一个整体单位进行回归。由于其与评价指标的一致性,已被证明是有效的。IoU有许多变体,如GIoU、DIoU、CIoU、α-IoU和SIoU等,形成相关损失函数。对GIoU、CIoU和SIoU进行了实验。 SIoU应用于YOLOv6-N和YOLOV 6-T,而其他的使用GIoU
- 对于 YOLOv6-N和YOLOv 6-T,SIoU Loss优于其他Loss,而对于 YOLOv6-M,CIoU Loss表现更好
- Probability Loss
- Dostronition Focal Loss(DFL)将框位置的基本连续分布简化为离散化概率分布。**它考虑了数据中的模糊性和不确定性,而不引入任何其他先验,这有助于提高框定位精度,特别是当GT框的边界模糊时。基于DFL,DFLv2开发了一个轻量级子网络,以利用分布统计和实际定位质量之间的密切相关性,进一步提高检测性能。然而,DFL通常输出比一般盒回归多17倍的回归值,导致大量开销。额外的计算成本显著阻碍了小模型的训练。
- 仅在YOLOv6-M/L中采用DFL
- Dostronition Focal Loss(DFL)将框位置的基本连续分布简化为离散化概率分布。**它考虑了数据中的模糊性和不确定性,而不引入任何其他先验,这有助于提高框定位精度,特别是当GT框的边界模糊时。基于DFL,DFLv2开发了一个轻量级子网络,以利用分布统计和实际定位质量之间的密切相关性,进一步提高检测性能。然而,DFL通常输出比一般盒回归多17倍的回归值,导致大量开销。额外的计算成本显著阻碍了小模型的训练。
- Object Loss
- FCOS中首次提出了Object Loss,以降低低质量边界框的分数,以便在后处理中过滤掉它们。在YOLOX中也使用了它来加速收敛并提高网络精度。作为一个像FCOS和YOLOX这样的anchor-free框架,本文尝试将Object Loss引入YOLOv6。不幸的是,它没有带来很多积极的效果。
- 在 YOLOv6中去除Object Loss
- IoU-series Loss: IoU Loss将预测框的四个边界作为一个整体单位进行回归。由于其与评价指标的一致性,已被证明是有效的。IoU有许多变体,如GIoU、DIoU、CIoU、α-IoU和SIoU等,形成相关损失函数。对GIoU、CIoU和SIoU进行了实验。 SIoU应用于YOLOv6-N和YOLOV 6-T,而其他的使用GIoU
Epochs
- 随着训练时间的增加,检测器的性能不断提高。我们将训练时间从300个周期延长到400个周期,以达到更好的收敛。
Self-distillation
- 在评估YOLOv5和YOLOv7中的模型性能时,在每个图像周围放置了half-stride灰色边界(就是resize图片时四周填充了灰度的padding)。虽然没有添加有用的信息,但它有助于检测图像边缘附近的对象。这个技巧也适用于YOLOv6
- 然而,额外的灰度像素明显降低了推理速度。如果没有灰色边界,YOLOv6的性能会恶化,这也是YOLOv5和YOLOv7中遇到的情况。我们假设该问题与Mosaic增强中的灰色边界填充有关。为了验证,进行了在最后一个epoch时关闭Mosaic增强的实验(又名衰退策略,fade strategy)。在这方面,我们改变了灰度边界的面积,并将具有灰度边界的图像直接调整为目标图像大小。结合这两种策略,我们的模型可以在不降低推理速度的情况下保持甚至提高性能
- 一方面,性能下降的问题得到了缓解。另一方面,无论是否填充灰色边界,小模型(YOLOv6-N/S)的精度都会提高
- 将输入图像限制为634×634,并在边缘周围添加3像素宽的灰色边界。使用该策略,最终图像的大小为预期的640×640。当最终图像尺寸从672减小到640时,YOLOv6-N/S/M的最终性能甚至更精确0.2%/0.3%/0.1%
Methodology
- https://github.com/meituan/YOLOv6/blob/main/docs/tutorial_repopt.md
- step 1 Training with RepOptimizer
- step 2 PTQ + sensitivity analyze
- step 3 QAT: channel-wise distillation
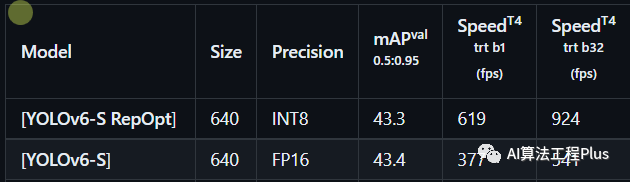
image-20230727171635419
RepOptimizers
重参数化优化器, 针对VGG这种结构进行优化
将先验信息用于修改梯度数值,称为梯度重参数化,对应的优化器称为RepOptimizer。我们着重关注VGG式的直筒模型,训练得到RepOptVGG模型,他有着高训练效率,简单直接的结构和极快的推理速度。
- paper https://arxiv.org/pdf/2205.15242.pdf
- code https://github.com/DingXiaoH/RepOptimizers
- https://zhuanlan.zhihu.com/p/531477704
- 与RepVGG的区别
- RepVGG加入了结构先验(如1x1,identity分支),并使用常规优化器训练。而RepOptVGG则是将这种先验知识加入到优化器实现中
- 尽管RepVGG在推理阶段可以把各分支融合,成为一个直筒模型。但是其训练过程中有着多条分支,需要更多显存和训练时间。而RepOptVGG可是 真-直筒模型,从训练过程中就是一个VGG结构
- 我们通过定制优化器,实现了结构重参数化和梯度重参数化的等价变换,这种变换是通用的,可以拓展到更多模型
https://github.com/meituan/YOLOv6/blob/main/docs/tutorial_repopt.md
def quant_sensitivity_analyse(model_ptq, evaler):
# disable all quantable layer
model_quant_disable(model_ptq)
# analyse each quantable layer
quant_sensitivity = list()
for k, m in model_ptq.named_modules():
if isinstance(m, quant_nn.QuantConv2d) or \
isinstance(m, quant_nn.QuantConvTranspose2d) or \
isinstance(m, quant_nn.MaxPool2d):
module_quant_enable(model_ptq, k)
else:
# module can not be quantized, continue
continue
eval_result = evaler.eval(model_ptq)
print(eval_result)
print("Quantize Layer {}, result mAP0.5 = {:0.4f}, mAP0.5:0.95 = {:0.4f}".format(k,
eval_result[0],
eval_result[1]))
quant_sensitivity.append((k, eval_result[0], eval_result[1]))
# disable this module sensitivity, anlayse next module
module_quant_disable(model_ptq, k)
return quant_sensitivity
EfficientRep:An Efficient Repvgg-style ConvNets with Hardware-aware Neural Network Design
backbone=dict(
type='EfficientRep',
num_repeats=[1, 6, 12, 18, 6],
out_channels=[64, 128, 256, 512, 1024],
),
neck=dict(
type='RepPANNeck',
num_repeats=[12, 12, 12, 12],
out_channels=[256, 128, 128, 256, 256, 512],
),
head=dict(
type='EffiDeHead',
in_channels=[128, 256, 512],
num_layers=3,
begin_indices=24,
anchors=1,
out_indices=[17, 20, 23],
strides=[8, 16, 32],
atss_warmup_epoch=0,
iou_type='giou',
use_dfl=False,
reg_max=0
)
- https://arxiv.org/abs/2302.00386
用了RepVGGOptimizer SGD针对VGGBlock进行优化
from ..layers.common import RealVGGBlock, LinearAddBlock
def extract_blocks_into_list(model, blocks):
for module in model.children():
if isinstance(module, LinearAddBlock) or isinstance(module, RealVGGBlock):
blocks.append(module)
else:
extract_blocks_into_list(module, blocks)
class RepVGGOptimizer(SGD):
'''scales is a list, scales[i] is a triple (scale_identity.weight, scale_1x1.weight, scale_conv.weight) or a two-tuple (scale_1x1.weight, scale_conv.weight) (if the block has no scale_identity)'''
def __init__(self, model, scales,
args, cfg, momentum=0, dampening=0,
weight_decay=0, nesterov=True,
reinit=True, use_identity_scales_for_reinit=True,
cpu_mode=False):
defaults = dict(lr=cfg.solver.lr0, momentum=cfg.solver.momentum, dampening=dampening, weight_decay=weight_decay, nesterov=nesterov)
if nesterov and (cfg.solver.momentum <= 0 or dampening != 0):
raise ValueError("Nesterov momentum requires a momentum and zero dampening")
# parameters = set_weight_decay(model)
parameters = get_optimizer_param(args, cfg, model)
super(SGD, self).__init__(parameters, defaults)
self.num_layers = len(scales)
blocks = []
extract_blocks_into_list(model, blocks)
convs = [b.conv for b in blocks]
assert len(scales) == len(convs)
if reinit:
for m in model.modules():
if isinstance(m, nn.BatchNorm2d):
gamma_init = m.weight.mean()
if gamma_init == 1.0:
LOGGER.info('Checked. This is training from scratch.')
else:
LOGGER.warning('========================== Warning! Is this really training from scratch ? =================')
LOGGER.info('##################### Re-initialize #############')
self.reinitialize(scales, convs, use_identity_scales_for_reinit)
self.generate_gradient_masks(scales, convs, cpu_mode)
def reinitialize(self, scales_by_idx, conv3x3_by_idx, use_identity_scales):
for scales, conv3x3 in zip(scales_by_idx, conv3x3_by_idx):
in_channels = conv3x3.in_channels
out_channels = conv3x3.out_channels
kernel_1x1 = nn.Conv2d(in_channels, out_channels, 1, device=conv3x3.weight.device)
if len(scales) == 2:
conv3x3.weight.data = conv3x3.weight * scales[1].view(-1, 1, 1, 1) \
+ F.pad(kernel_1x1.weight, [1, 1, 1, 1]) * scales[0].view(-1, 1, 1, 1)
else:
assert len(scales) == 3
assert in_channels == out_channels
identity = torch.from_numpy(np.eye(out_channels, dtype=np.float32).reshape(out_channels, out_channels, 1, 1)).to(conv3x3.weight.device)
conv3x3.weight.data = conv3x3.weight * scales[2].view(-1, 1, 1, 1) + F.pad(kernel_1x1.weight, [1, 1, 1, 1]) * scales[1].view(-1, 1, 1, 1)
if use_identity_scales: # You may initialize the imaginary CSLA block with the trained identity_scale values. Makes almost no difference.
identity_scale_weight = scales[0]
conv3x3.weight.data += F.pad(identity * identity_scale_weight.view(-1, 1, 1, 1), [1, 1, 1, 1])
else:
conv3x3.weight.data += F.pad(identity, [1, 1, 1, 1])
def generate_gradient_masks(self, scales_by_idx, conv3x3_by_idx, cpu_mode=False):
self.grad_mask_map = {}
for scales, conv3x3 in zip(scales_by_idx, conv3x3_by_idx):
para = conv3x3.weight
if len(scales) == 2:
mask = torch.ones_like(para, device=scales[0].device) * (scales[1] ** 2).view(-1, 1, 1, 1)
mask[:, :, 1:2, 1:2] += torch.ones(para.shape[0], para.shape[1], 1, 1, device=scales[0].device) * (scales[0] ** 2).view(-1, 1, 1, 1)
else:
mask = torch.ones_like(para, device=scales[0].device) * (scales[2] ** 2).view(-1, 1, 1, 1)
mask[:, :, 1:2, 1:2] += torch.ones(para.shape[0], para.shape[1], 1, 1, device=scales[0].device) * (scales[1] ** 2).view(-1, 1, 1, 1)
ids = np.arange(para.shape[1])
assert para.shape[1] == para.shape[0]
mask[ids, ids, 1:2, 1:2] += 1.0
if cpu_mode:
self.grad_mask_map[para] = mask
else:
self.grad_mask_map[para] = mask.cuda()
def __setstate__(self, state):
super(SGD, self).__setstate__(state)
for group in self.param_groups:
group.setdefault('nesterov', False)
def step(self, closure=None):
loss = None
if closure is not None:
loss = closure()
for group in self.param_groups:
weight_decay = group['weight_decay']
momentum = group['momentum']
dampening = group['dampening']
nesterov = group['nesterov']
for p in group['params']:
if p.grad is None:
continue
if p in self.grad_mask_map:
d_p = p.grad.data * self.grad_mask_map[p] # Note: multiply the mask here
else:
d_p = p.grad.data
if weight_decay != 0:
d_p.add_(weight_decay, p.data)
if momentum != 0:
param_state = self.state[p]
if 'momentum_buffer' not in param_state:
buf = param_state['momentum_buffer'] = torch.clone(d_p).detach()
else:
buf = param_state['momentum_buffer']
buf.mul_(momentum).add_(1 - dampening, d_p)
if nesterov:
d_p = d_p.add(momentum, buf)
else:
d_p = buf
p.data.add_(-group['lr'], d_p)
return loss
- In the
stepfunction, RepOptimizers will use the Grad Mults properly. For SGD, please see here. For AdamW, please see here and here. - https://github.com/meituan/YOLOv6/blob/main/yolov6/utils/RepOptimizer.py
- https://github.com/DingXiaoH/RepOptimizers/blob/main/repoptimizer/repoptvgg_impl.py
- 不同的优化器SGD AdamW配置不同
Partial quantization
- https://github.com/meituan/YOLOv6/blob/main/tools/partial_quantization/sensitivity_analyse.py
先做参数敏感性分析,再对不敏感的参数进行量化 所谓参数敏感性,就是判断参数变化对性能是否影响,如果影响很大,则敏感,否则不敏感, 采用控制变量法进行逐层分析 评价指标是在数据集上测试mAP,mAP相对全精度变化大则认为敏感 最后做敏感度排序
def quant_sensitivity_analyse(model_ptq, evaler):
# disable all quantable layer
model_quant_disable(model_ptq)
# analyse each quantable layer
quant_sensitivity = list()
for k, m in model_ptq.named_modules():
if isinstance(m, quant_nn.QuantConv2d) or \
isinstance(m, quant_nn.QuantConvTranspose2d) or \
isinstance(m, quant_nn.MaxPool2d):
module_quant_enable(model_ptq, k)
else:
# module can not be quantized, continue
continue
eval_result = evaler.eval(model_ptq)
print(eval_result)
print("Quantize Layer {}, result mAP0.5 = {:0.4f}, mAP0.5:0.95 = {:0.4f}".format(k,
eval_result[0],
eval_result[1]))
quant_sensitivity.append((k, eval_result[0], eval_result[1]))
# disable this module sensitivity, anlayse next module
module_quant_disable(model_ptq, k)
return quant_sensitivity
def module_quant_disable(model, k):
cur_module = get_module(model, k)
if hasattr(cur_module, '_input_quantizer'):
cur_module._input_quantizer.disable()
if hasattr(cur_module, '_weight_quantizer'):
cur_module._weight_quantizer.disable()
def module_quant_enable(model, k):
cur_module = get_module(model, k)
if hasattr(cur_module, '_input_quantizer'):
cur_module._input_quantizer.enable()
if hasattr(cur_module, '_weight_quantizer'):
cur_module._weight_quantizer.enable()
With partial quantization, we finally reach 42.1%, only 0.3% loss in accuracy, while the throughput of the partially quantized model is about 1.56 times that of the FP16 model at a batch size of 32. This method achieves a nice tradeoff between accuracy and throughput.
Pytorch quantization
- https://docs.nvidia.com/deeplearning/tensorrt/pytorch-quantization-toolkit/docs/index.html
- https://github.com/Jermmy/pytorch-quantization-demo
- 自定义量化模块 https://docs.nvidia.com/deeplearning/tensorrt/pytorch-quantization-toolkit/docs/tutorials/creating_custom_quantized_modules.html
- 主要是卷积层、反卷积层、池化层
- 注意输入或者权重的量化封装情况,有的只量化输入,有的要量化输入和权重
- 也可以自定义
TensorQuantizer进行控制
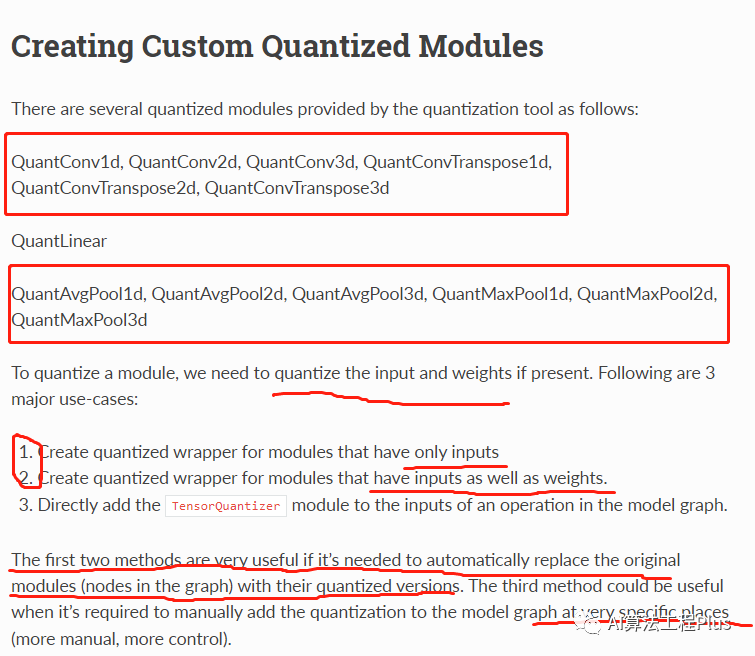
image-20230728141622388
- https://github.com/NVIDIA/TensorRT/blob/master/tools/pytorch-quantization/examples/torchvision/models/classification/resnet.py
if quantize:
self.conv1 = quant_nn.QuantConv2d(3,
self.inplanes,
kernel_size=7,
stride=2,
padding=3,
bias=False)
else:
self.conv1 = nn.Conv2d(3, self.inplanes, kernel_size=7, stride=2, padding=3, bias=False)
https://github.com/Jermmy/pytorch-quantization-demo/blob/master/model.py#L34
QAT需要对需要量化的层进行替换,比如QConv2d QReLU QMaxPooling2d QLinear,相当于用Q重构模型进行训练和推理,其中Qxx参考 https://github.com/Jermmy/pytorch-quantization-demo/blob/master/module.py (最好用官方的进行替换QuantConv2d,或者源码替换QConv2d)
class Net(nn.Module):
def __init__(self, num_channels=1):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(num_channels, 40, 3, 1)
self.conv2 = nn.Conv2d(40, 40, 3, 1, groups=20)
self.fc = nn.Linear(5*5*40, 10)
def forward(self, x):
x = F.relu(self.conv1(x))
x = F.max_pool2d(x, 2, 2)
x = F.relu(self.conv2(x))
x = F.max_pool2d(x, 2, 2)
x = x.view(-1, 5*5*40)
x = self.fc(x)
return x
def quantize(self, num_bits=8):
self.qconv1 = QConv2d(self.conv1, qi=True, qo=True, num_bits=num_bits)
self.qrelu1 = QReLU()
self.qmaxpool2d_1 = QMaxPooling2d(kernel_size=2, stride=2, padding=0)
self.qconv2 = QConv2d(self.conv2, qi=False, qo=True, num_bits=num_bits)
self.qrelu2 = QReLU()
self.qmaxpool2d_2 = QMaxPooling2d(kernel_size=2, stride=2, padding=0)
self.qfc = QLinear(self.fc, qi=False, qo=True, num_bits=num_bits)
def quantize_forward(self, x):
x = self.qconv1(x)
x = self.qrelu1(x)
x = self.qmaxpool2d_1(x)
x = self.qconv2(x)
x = self.qrelu2(x)
x = self.qmaxpool2d_2(x)
x = x.view(-1, 5*5*40)
x = self.qfc(x)
return x
def freeze(self):
self.qconv1.freeze()
self.qrelu1.freeze(self.qconv1.qo)
self.qmaxpool2d_1.freeze(self.qconv1.qo)
self.qconv2.freeze(qi=self.qconv1.qo)
self.qrelu2.freeze(self.qconv2.qo)
self.qmaxpool2d_2.freeze(self.qconv2.qo)
self.qfc.freeze(qi=self.qconv2.qo)
def quantize_inference(self, x):
qx = self.qconv1.qi.quantize_tensor(x)
qx = self.qconv1.quantize_inference(qx)
qx = self.qrelu1.quantize_inference(qx)
qx = self.qmaxpool2d_1.quantize_inference(qx)
qx = self.qconv2.quantize_inference(qx)
qx = self.qrelu2.quantize_inference(qx)
qx = self.qmaxpool2d_2.quantize_inference(qx)
qx = qx.view(-1, 5*5*40)
qx = self.qfc.quantize_inference(qx)
out = self.qfc.qo.dequantize_tensor(qx)
return out
Post-training quantization (PTQ)
- https://github.com/meituan/YOLOv6/blob/main/tools/partial_quantization/ptq.py
- https://docs.nvidia.com/deeplearning/tensorrt/pytorch-quantization-toolkit/docs/userguide.html#post-training-quantization
QuantDescriptor 定义量化方法直方图,量化位数8bit,作为量化输入描述子 conv2d_weight_default_desc 作为权重量化描述子 针对Conv2d ConvTranspose2d MaxPool2d分别用相应的量化算子替代即可 PTQ只需迭代1-2epoch即可,而且是推理阶段(前向传播 with torch.no_grad()) 考虑敏感性分析,非敏感层可以用PTQ,敏感层不变,可以减少精度损失
def quant_model_init(model, device):
model_ptq = copy.deepcopy(model)
model_ptq.eval()
model_ptq.to(device)
conv2d_weight_default_desc = tensor_quant.QUANT_DESC_8BIT_CONV2D_WEIGHT_PER_CHANNEL
conv2d_input_default_desc = QuantDescriptor(num_bits=8, calib_method='histogram')
convtrans2d_weight_default_desc = tensor_quant.QUANT_DESC_8BIT_CONVTRANSPOSE2D_WEIGHT_PER_CHANNEL
convtrans2d_input_default_desc = QuantDescriptor(num_bits=8, calib_method='histogram')
for k, m in model_ptq.named_modules():
if 'proj_conv' in k:
print("Skip Layer {}".format(k))
continue
if isinstance(m, nn.Conv2d):
in_channels = m.in_channels
out_channels = m.out_channels
kernel_size =
m.kernel_size
stride = m.stride
padding = m.padding
quant_conv = quant_nn.QuantConv2d(in_channels,
out_channels,
kernel_size,
stride,
padding,
quant_desc_input = conv2d_input_default_desc,
quant_desc_weight = conv2d_weight_default_desc)
quant_conv.weight.data.copy_(m.weight.detach())
if m.bias is not None:
quant_conv.bias.data.copy_(m.bias.detach())
else:
quant_conv.bias = None
set_module(model_ptq, k, quant_conv)
elif isinstance(m, nn.ConvTranspose2d):
in_channels = m.in_channels
out_channels = m.out_channels
kernel_size = m.kernel_size
stride = m.stride
padding = m.padding
quant_convtrans = quant_nn.QuantConvTranspose2d(in_channels,
out_channels,
kernel_size,
stride,
padding,
quant_desc_input = convtrans2d_input_default_desc,
quant_desc_weight = convtrans2d_weight_default_desc)
quant_convtrans.weight.data.copy_(m.weight.detach())
if m.bias is not None:
quant_convtrans.bias.data.copy_(m.bias.detach())
else:
quant_convtrans.bias = None
set_module(model_ptq, k, quant_convtrans)
elif isinstance(m, nn.MaxPool2d):
kernel_size = m.kernel_size
stride = m.stride
padding = m.padding
dilation = m.dilation
ceil_mode = m.ceil_mode
quant_maxpool2d = quant_nn.QuantMaxPool2d(kernel_size,
stride,
padding,
dilation,
ceil_mode,
quant_desc_input = conv2d_input_default_desc)
set_module(model_ptq, k, quant_maxpool2d)
else:
# module can not be quantized, continue
continue
return model_ptq.to(device)
def collect_stats(model, data_loader, num_batches):
"""Feed data to the network and collect statistic"""
# Enable calibrators
for name, module in model.named_modules():
if isinstance(module, quant_nn.TensorQuantizer):
if module._calibrator is not None:
module.disable_quant()
module.enable_calib()
else:
module.disable()
for i, (image, _) in tqdm(enumerate(data_loader), total=num_batches):
model(image.cuda())
if i >= num_batches:
break
# Disable calibrators
for name, module in model.named_modules():
if isinstance(module, quant_nn.TensorQuantizer):
if module._calibrator is not None:
module.enable_quant()
module.disable_calib()
else:
module.enable()
def compute_amax(model, **kwargs):
# Load calib result
for name, module in model.named_modules():
if isinstance(module, quant_nn.TensorQuantizer):
if module._calibrator is not None:
if isinstance(module._calibrator, calib.MaxCalibrator):
module.load_calib_amax()
else:
module.load_calib_amax(**kwargs)
print(F"{name:40}: {module}")
model.cuda()
# It is a bit slow since we collect histograms on CPU
with torch.no_grad():
collect_stats(model, data_loader, num_batches=2)
compute_amax(model, method="percentile", percentile=99.99)
1 As of v0.2.0 release, traditional post-training quantization (PTQ) produces a degraded performance of
YOLOv6-Sfrom 43.4% to 41.2%. 直接使用PTQ,精度降低了2.2% 2 We apply post-training quantization toYOLOv6-S-RepOpt, and its mAP slightly drops by 0.5%. 使用了RepOPT、敏感性分析、PTQ之后,精度只降低了0.5% 3 Besides, we involve channel-wise distillation to accelerate the convergence. We finally reach a quantized model at 43.0% mAP. The performance arrives at 43.3% mAP, only 0.1% left to match the fully float precision ofYOLOv6-S. 再使用QAT中通道蒸馏加快收敛,精度提高了0.4%,最后只损失了0.1%的精度
Quantization-aware training (QAT)
1 Quantization Aware Training is based on Straight Through Estimator (STE) derivative approximation. 量化感知训练是基于直通式估算器(STE)导数优化 2 After calibration is done, Quantization Aware Training is simply select a training schedule and continue training the calibrated model. Usually, it doesn’t need to fine tune very long. We usually use around 10% of the original training schedule, starting at 1% of the initial training learning rate, and a cosine annealing learning rate schedule that follows the decreasing half of a cosine period, down to 1% of the initial fine tuning learning rate (0.01% of the initial training learning rate). 先标定int8,后QAT,二者需要互斥 在训练的时候大概10%的epochs,学习率要小,初始学习率占1%,用cosine annealing learning衰减,知道学习率衰减到0.01%的初始学习率 3 Do not change quantization representation (scale) during training, at least not too frequently. Changing scale every step 不要频繁的按照step改变学习率
- https://github.com/meituan/YOLOv6/blob/main/tools/qat/qat_utils.py
- https://docs.nvidia.com/deeplearning/tensorrt/pytorch-quantization-toolkit/docs/userguide.html#quantization-aware-training
- 通道蒸馏 channel-wise kd
- https://arxiv.org/abs/2011.13256
- Channel-wise Knowledge Distillation for Dense Prediction
- Spatial distillation:空间方向的蒸馏,可以理解成对所有通道的相同位置的点做归一化,然后让学生网络学习这个归一化后的分布,可以理解成对类别的蒸馏。
- Channel distillation:通道方向的蒸馏,可以理解成对单个通道内做归一化,然后让学生网络学习这个归一化后的分布,可以理解成对位置的蒸馏。
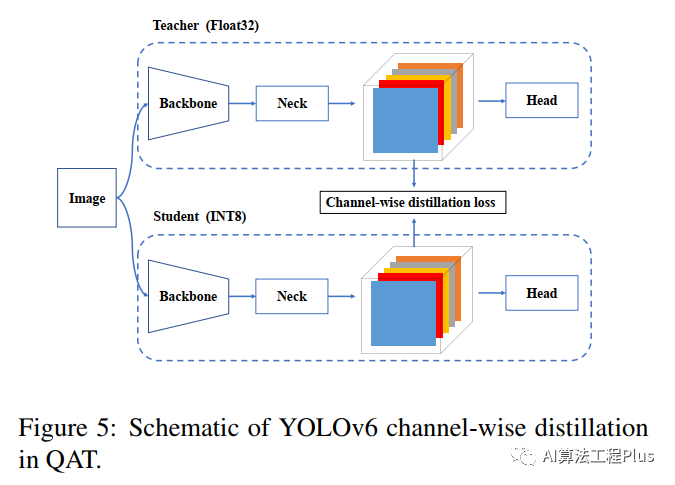
image-20230731114708858
if self.args.distill:
with torch.no_grad():
t_preds, t_featmaps = self.teacher_model(images)
temperature = self.args.temperature
total_loss, loss_items = self.compute_loss_distill(preds, t_preds, s_featmaps, t_featmaps, targets, \
epoch_num, self.max_epoch, temperature, step_num,
batch_height, batch_width)
def distill_loss_cw(self, s_feats, t_feats, temperature=1):
N,C,H,W = s_feats[0].shape
# print(N,C,H,W)
loss_cw = F.kl_div(F.log_softmax(s_feats[0].view(N,C,H*W)/temperature, dim=2),
F.log_softmax(t_feats[0].view(N,C,H*W).detach()/temperature, dim=2),
reduction='sum',
log_target=True) * (temperature * temperature)/ (N*C)
N,C,H,W = s_feats[1].shape
# print(N,C,H,W)
loss_cw += F.kl_div(F.log_softmax(s_feats[1].view(N,C,H*W)/temperature, dim=2),
F.log_softmax(t_feats[1].view(N,C,H*W).detach()/temperature, dim=2),
reduction='sum',
log_target=True) * (temperature * temperature)/ (N*C)
N,C,H,W = s_feats[2].shape
# print(N,C,H,W)
loss_cw += F.kl_div(F.log_softmax(s_feats[2].view(N,C,H*W)/temperature, dim=2),
F.log_softmax(t_feats[2].view(N,C,H*W).detach()/temperature, dim=2),
reduction='sum',
log_target=True) * (temperature * temperature)/ (N*C)
# print(loss_cw)
return loss_cw
Export to ONNX
- 使用了pytorch_quantization后模型由pt导出onnx需要使用pytorch的伪量化函数
# First set static member of TensorQuantizer to use Pytorch’s own fake quantization functions
from pytorch_quantization import nn as quant_nn
quant_nn.TensorQuantizer.use_fb_fake_quant = True
Deployment with TensorRT
最好用docker-TensorRT-8.5版本
- performance
image-20230728144808883
- INT8 calibration
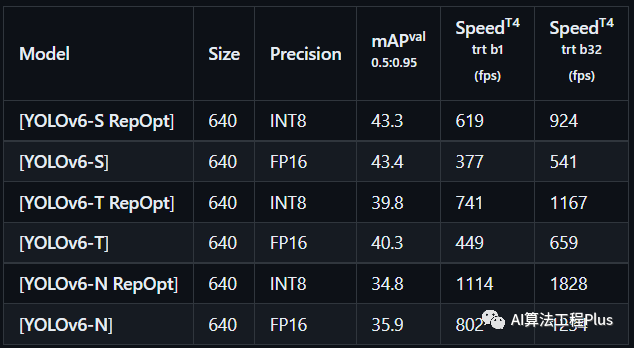
image-20230728150155064
- ablation study for yolov6-nano
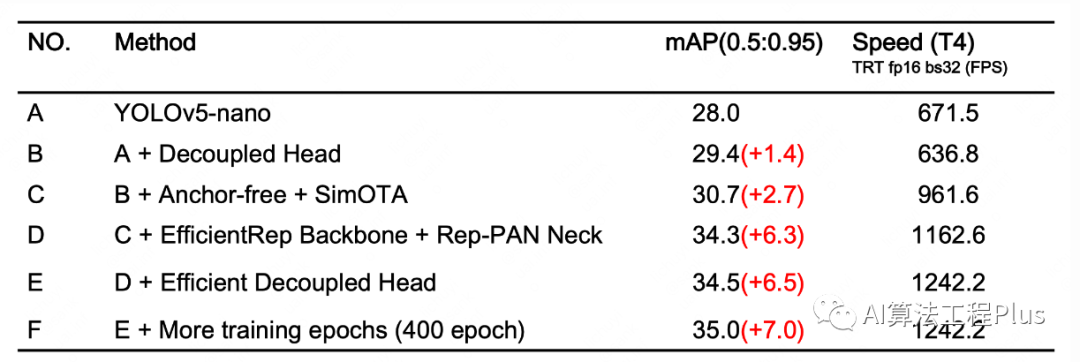
image-20230731102922901
Notes
- 无论是PTQ推理量化,还是QAT训练量化,二者都需要对需要量化的层进行替换,最终保存是量化后网络的权重,而非网络结构
- 这篇文章工程能力很强,值得借鉴
References
- A Survey of Model Compression and Acceleration for Deep Neural Networks
- https://github.com/meituan/YOLOv6/blob/main/docs/tutorial_repopt.md
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2023-07-31 15:53,如有侵权请联系 cloudcommunity@tencent.com 删除
本文分享自 iResearch666 微信公众号,前往查看
如有侵权,请联系 cloudcommunity@tencent.com 删除。
本文参与 腾讯云自媒体同步曝光计划 ,欢迎热爱写作的你一起参与!
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号