PID控制原理及应用(一)
原创
PID控制原理及应用(一)
原创
凌启科技
发布于 2024-06-09 21:51:20
发布于 2024-06-09 21:51:20
PID控制原理及应用(一)
作者:凌启科技
1 PID的基本概念
PID控制原理图下图1,PID控制系统包括三个模块:P比例控制、I积分控制、D微分控制。P比例控制:基本作用就是控制对象以线性的方式增加,在一个常量比例下,动态输出,缺点是会产生稳态误差;I积分控制:基本作用就是用来消除稳态误差,缺点是会增加超调;D微分控制:基本作用就是减弱超调,加大惯性响应速度。P、I、D根据实际控制对象选择不同组合,如PI控制、PD控制、PID控制。(参考链接:https://blog.csdn.net/weixin_48435215/article/details/125261840)
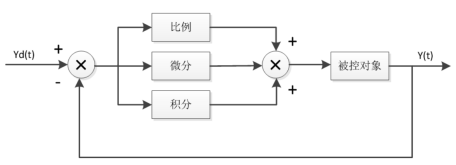
图1
2 PID的深入理解
2.1 PID在一阶系统中的应用
假如要控制一个电机的转速,这是目标值T,电机还有一个测速仪实时测量电机的转速M,还有一个供电系统为电机供电,假设电机为理想模型,不考虑滞后,即转速和功率成线性关系,没有空气阻力。现在利用PID算法进行控制,首先只加入P比例控制,P控制器的输出表达式为式1,
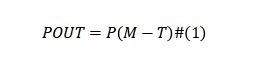
公式1
在实际系统中,POUT就是电信号,与供电系统输出功率呈线性关系,假设此时输入给电机的功率是W,加上比例控制器的输出,总功率就是(W+POUT),由此可知当(M-T)为0时,比例控制器输出为0,系统达到稳定状态,电机转速为T,控制任务完成。
但此时加入空气阻力后,电机转速会下降,此时P控制器会增加输出,这个输出有一部分用于提高电机转速,有一部分会用于抵消风阻,电机转速还是会不断向T接近,但此时P控制器的输出也会不断减小,但M达到一定值时,P控制器的输出刚好只能用来抵消风阻,此时M达到稳定,但始终小于T,如图2,这时光靠P控制无法完成控制任务。
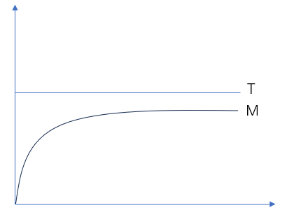
图2
于是考虑加入I积分控制,积分控制是不断累加误差,积分控制器的输出表达式见式2,这样M就有了继续靠近T的动力,
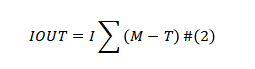
公式2
随着i控制器的不断累加,M会逐渐靠近T,直到等于T,如图3,此时i控制器的输出固定,控制任务完成。
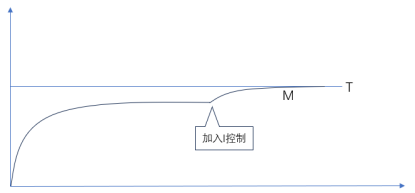
图3
在这类系统中,PID控制器输出代表的信号与被控制量呈线性关系,如上面的电信号和电机转速,这里将此类系统称为一阶系统,此类系统只用PI控制就能达到控制目的。
2.2 PID在二阶系统中的应用
根据上面一阶系统的线性关系特点,我们可以继续研究,如果PID控制器输出代表的信号与被控制量不呈线性关系,且与时间有关,那整个控制过程是怎样的。
这里以无人机的姿态控制为例,如图4,假设此时无人机有一个倾角。
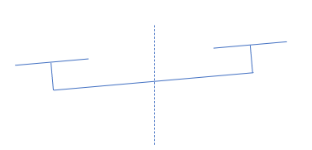
图4
现在需要将无人机控制到水平状态,这里目标姿态角是T,无人机实时姿态角是M,首先还是加入P控制器,此时左边电机加速右边电机减速,无人机有一个顺时针旋转的角加速度,随着时间的累加,无人机的角速度越来越大,无人机的姿态角会不断减小,根据式1,P控制器的输出会不断减小,即无人机的角加速度也会不断减小,当无人机姿态角为0时,无人机水平,但由于之前一直在加速,所以此时无人机的角速度不为0,且达到最大值,无人机还会继续顺时针旋转,之后会有一个负的角加速度,角速度会不断减小直至为0,此时角加速度达到最大值,方向与之前相反,之后无人机会一直周期性的左右摇摆,如图5,这个现象也与某些成熟的PID整定方法中描述的现象相吻合。
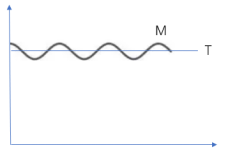
图5
此时加入D控制器,D控制器的作用是抑制变化,当无人机倾角逐渐向0接近时,D控制器会根据角速度成比例的实时输出一个负的控质量(与P控制器的输出相反),角速度越大这个负控质量就会越大,由此我们可以知道,此时无人机倾角接近0时的角速度肯定比没有加D控制器时的小,实际上,如果参数适中,无人机会很快收敛,如图6,然后达到水平状态,即控制任务完成。
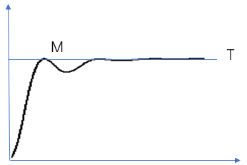
图6
之前是假设无人机是一个质量均匀的理想模型,实际应用中,不可能质量均匀,假设无人机重心不在中心而靠右,那时上图6就不成立,最终稳态倾角不能达到目标T,而是大于或小于T,如图7(小于T的情况),这与2.1节中加入空气阻力后的情况
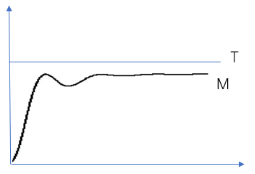
图7
是一样的,此时我们需要加入I控制器,I控制器会累加误差,其输出量方向与P控制器相同,如图8。
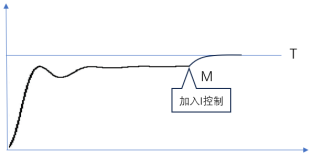
图8
这里将上述系统称之为二阶系统,其特点是PID输出信号会经过双重时间累加进而改变被控制量,如上述系统首先PID控制器的输出会改变四个电机的升力,无人机开始获得角加速度,经过时间累加进而改变角速度,再改变角度。这类系统需要同时加入P、I、D控制才能达到控制要求。
实际应用中PID的参数整定是一个很繁琐且有难度的工作,而且为了达到更好的控制效果,有时会加多级PID。凌启科技试图在理论上找到一些规律,力求降低PID整定的难度,后续研究会不断更新发布。
(~~未完待续--第三章:PID控制器在无人机姿态控制过程中的数学表达式~~)
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号