推荐一款开源自托管协作Markdown编辑器:HedgeDoc

推荐一款开源自托管协作Markdown编辑器:HedgeDoc

开源星探
发布于 2024-11-08 16:29:33
发布于 2024-11-08 16:29:33

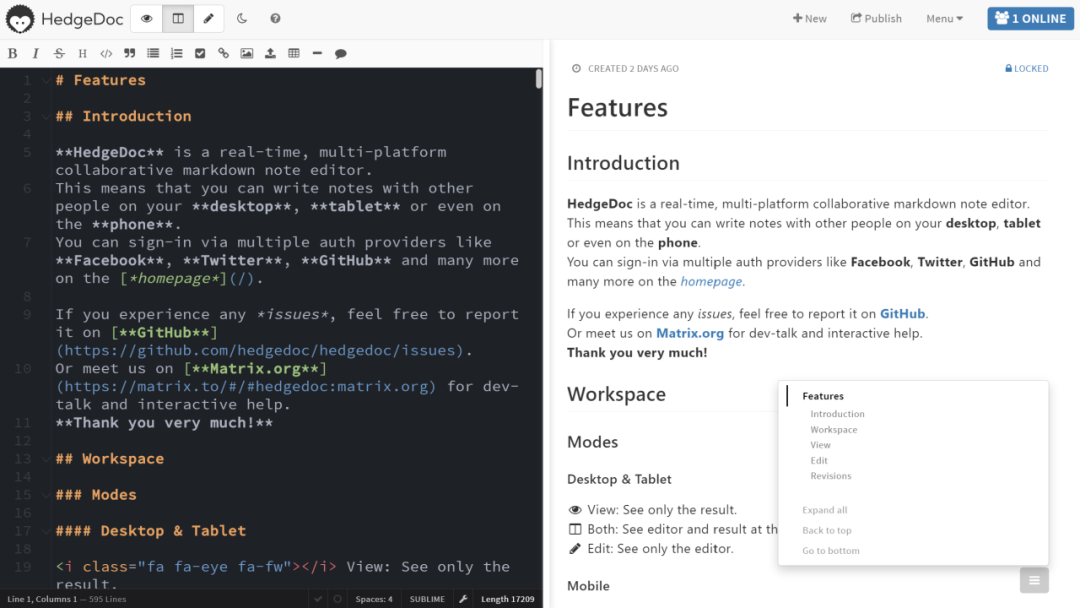
HedgeDoc 是一款功能强大且方便易用的开源协作编辑工具,适合团队实时协作创建笔记、制作图表,甚至演示文稿。
作为一款完全基于网页的应用,HedgeDoc 无需任何额外安装,只需在浏览器中打开,即可开始协作编辑。它不仅支持多种功能,还能自托管,确保数据安全和隐私,深受技术团队和企业青睐。
主要功能
- • Web-Based,无需安装:完全基于浏览器,省去了额外的软件安装。用户只需一个浏览器,就可以随时访问和编辑内容,真正做到了便捷使用。
- • 自托管,数据自主可控:支持在自己的服务器上部署。对团队或企业来说,意味着不再依赖第三方服务,数据可以牢牢掌控在自己手中,确保数据隐私和安全。
- • 实时协作:支持多人协作,团队成员可以实时查看和编辑内容,看到彼此的修改,便于项目的快速推进。
- • Markdown演示模式:支持使用 Markdown 语法创建幻灯片,并配合 reveal.js 插件生成流畅的演示文稿,适合会议、培训等场景。
- • 图表和嵌入式内容:提供对多种图表和图示的支持,极大增强了笔记的视觉效果,能够更清晰地表达复杂的内容或数据。
- • 便捷的权限管理:提供简单的权限管理功能,用户可以轻松设定笔记的访问权限,确保内容仅限指定人员查看或编辑。
- • 版本控制:每一次修改都会被记录在案,用户可以回溯到任何一个历史版本,为协作和内容管理提供了极大的便利。
使用方法
HedgeDoc 支持多种方式部署,可以选择 Docker 镜像、自行安装或使用一键部署平台来安装。
当然官方也提供有Demo体验地址,可供使用,但切记勿复制上传隐私信息。

使用者只需将服务器地址分享给团队成员,大家打开网页就能开始协作编辑。文档内容支持 Markdown 格式,编辑上手简单,快捷键和格式化工具一应俱全,文档还可以随时切换到预览模式查看效果。
对于有需求的用户,还可以通过 reveal.js 插件快速生成演示文稿,为团队会议或在线分享增添便捷。
结语
HedgeDoc 是团队协作、内容管理的理想选择。通过直观的界面、实时的协作和强大的 Markdown 支持,它帮助团队成员保持步调一致,高效完成各类任务。
GitHub 地址:https://github.com/hedgedoc/hedgedoc
Demo地址:https://demo.hedgedoc.org/
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2024-11-07,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号