⚡️ 一个LED灯的自述:我是如何被5层代码点亮的
原创
⚡️ 一个LED灯的自述:我是如何被5层代码点亮的
原创
程序员吾真本
发布于 2024-12-11 22:29:37
发布于 2024-12-11 22:29:37
讲动人的故事,写懂人的代码
当嵌入式开发小小白(既是嵌入式开发小白,又是编程小白)读到下面的嵌入式开发核心概念BSP、HAL和PAC的描述时,常常会感到一头雾水。
板级支持包(Board Support Crate, BSP, 在非 Rust 环境中通常称为Board Support Package板级支持包,因此有此缩写)BSP 的职责是对整个开发板(如 micro:bit)进行统一抽象。它需要提供对微控制器以及板上的传感器、LED 等设备的抽象接口。对于定制开发板,通常没有现成的 BSP 可用。这种情况下,你需要使用芯片的 HAL,并自行开发传感器驱动程序或在 crates.io 上寻找。不过幸运的是,micro:bit 已有现成的名为microbit-v2的 BSP,所以我们可以直接在 HAL 之上使用它。
硬件抽象层(Hardware Abstraction Layer, HAL)HAL 建立在芯片的 PAC 之上,为不熟悉芯片特性的开发者提供易用的抽象接口。HAL 通常将每个外设抽象为独立的结构体,使开发者能够方便地进行数据传输等操作。如果开发micro:bit v2开发板的嵌入式程序,我们将使用 nRF52-hal。
接下来我们来探讨 Rust 嵌入式世界中的一个核心软件组件:
embedded-hal。正如其名称所示,它与我们了解到的第二层抽象 HAL 层密切相关。embedded-hal提供了一组特征(traits),用于描述所有 HAL 实现中特定外设的共同行为。比如,它定义了控制引脚电源开关的基本功能,这使我们能够控制开发板上的 LED 灯或其他设备。embedded-hal让我们能够开发通用的硬件驱动程序(如温度传感器驱动),这些驱动程序可以在任何实现了embedded-hal特征的芯片上运行。这种通用性是通过仅依赖embedded-hal特征来实现的。这样编写的驱动程序被称为平台无关的。值得庆幸的是,crates.io上的驱动程序大多都采用了这种平台无关的设计。外设访问包(Peripheral Access Crate, PAC)PAC 为芯片的外设提供相对安全的直接访问接口,让开发者能够精确控制每个寄存器位(当然也可能会配置错误)。通常只有在更高层抽象无法满足需求时,或开发更高层代码时,才需要直接使用 PAC。如果开发micro:bit v2开发板的嵌入式程序,我们将主要以隐式方式使用 nRF52 的 PAC。

现在,小吾就带大家分析一个简单的例子:用Rust代码点亮micro:bit v2开发板上的一个LED灯(如图1)。通过这个例子,我们将深入理解BSP、HAL、embedded-hal和PAC这些概念到底说的是什么。
图1 用Rust代码点亮micro:bit v2开发板上的一个LED灯
在深入讨论之前,让我们先看一下代码。
点亮LED灯的Rust代码
本文的完整代码可在github的wubin28账号的learn-rust-by-games代码库的ch01/lu1l目录下找到。如果想运行这些代码,你只需花费两三杯咖啡的价格购买一块micro:bit v2开发板,然后按照《小小白学Rust:从点亮LED到玩转编程》(极简版)第1章的步骤操作即可。下面列出与本文相关的两个源代码文件。
Rust源代码入口文件:src/main.rs
Rust源代码入口文件src/main.rs如代码清单1所示:
代码清单1 ch01/lu1l/src/main.rs
// 禁用不安全代码
#![deny(unsafe_code)]
// 声明这是一个独立程序,不使用标准入口点
#![no_main]
// 不使用标准库,这是嵌入式系统常见做法
#![no_std]
// 导入必要的嵌入式开发库
// 指定程序起点
use cortex_m_rt::entry;
// 操作硬件接口
use embedded_hal::digital::OutputPin;
// 控制开发板
use microbit::board::Board;
// 导入 panic 运行时错误处理程序
use panic_halt as _;
// 程序入口点
#[entry]
fn main() -> ! { // 返回 ! 表示这是一个不返回的函数
// 获取 microbit 板的控制权
let mut board = Board::take().unwrap();
// 点亮LED点阵的第4行第4列的LED,
// 即在设置第4列为低电平的同时,设置第4行为高电平
board.display_pins.col4.set_low().unwrap();
board.display_pins.row4.set_high().unwrap();
// 无限循环保持程序运行
loop {}
}通用Rust项目包管理文件:Cargo.toml
通用Rust项目包管理文件Cargo.toml如代码清单2所示:
代码清单2 ch01/lu1l/Cargo.toml
[package]
# 项目名称
name = "lu1l"
# 项目版本号
version = "0.1.0"
# Rust版本要求(2021版)
edition = "2021"
# 依赖包及其版本号
[dependencies]
# Cortex-M启动运行时支持
cortex-m-rt = "0.7.3"
# 提供panic处理机制,程序崩溃时停止运行
panic-halt = "0.2.0"
# BBC micro:bit v2开发板支持包
microbit-v2 = "0.15.0"
# 嵌入式硬件抽象层接口
embedded-hal = "1.0.0"Cargo.toml是Rust项目的核心配置文件,它记录了项目的基本信息,如项目名称、版本号和所需的依赖包。
🧠为什么我们需要在Cargo.toml的[dependencies]下列出这些依赖包?如果删除它们会发生什么?你能找出这些依赖包分别对应main.rs中的哪些代码吗?
💡我们聊聊为什么需要在Cargo.toml中列出这些依赖包,以及它们如何与main.rs中的代码相互配合。首先是cortex-m-rt包,它就像一个启动器,负责初始化Cortex-M处理器并处理程序的启动流程。在代码中,我们通过use cortex_m_rt::entry和#[entry]标注来使用它。如果没有这个包,程序就无法启动,因为找不到入口点。
接着是panic-halt包。它的作用是在程序发生严重错误时,让系统进入一个安全的停止状态。代码中的use panic_halt as _就是在使用它。在嵌入式环境中,我们必须有这样一个错误处理机制,否则编译器会提醒我们缺少必要的安全保障。
microbit-v2包则是我们的主角,它提供了与开发板交互的所有功能。当我们在代码中写use microbit::board::Board时,就是在调用这个包提供的功能。如果没有它,我们就无法控制开发板上的任何组件。
最后是embedded-hal包,它像是一个通用的翻译器,定义了控制硬件的标准接口。在代码中,我们用use embedded_hal::digital::OutputPin来操作引脚。这个包让我们可以用统一的方式来控制不同的硬件设备。
如果删除这些依赖包中的任何一个,我们的代码就会像缺少零件的机器一样无法工作。这是因为:
- 这些包各自承担着不可或缺的基础功能
- 它们之间存在着密切的协作关系
- 在嵌入式开发这个特殊的环境中,它们共同提供了必要的系统支持
点亮LED灯为何仅使用microbit-v2还不够?
🧠为什么仅使用Cargo.toml中的microbit-v2依赖包还不够,还需要embedded-hal依赖包来点亮LED灯?这两个依赖包是如何配合工作的?
💡我们聊一下为什么仅使用microbit-v2依赖包还不够,还需要embedded-hal依赖包来点亮LED灯。这个问题涉及到依赖包之间的协作机制。
首先,microbit-v2作为一个板级支持包,就像一位管家,负责管理整个开发板。但管家需要一套标准的、平台无关的规则来操作各种设备,包括LED灯。这样的标准规则能让同样的操作方法适用于不同的硬件平台(比如本文所讨论的micro:bit v2 平台,或者 Arduino、STM32、ESP32 平台)。
这时,embedded-hal就像一本通用的操作手册,它定义了标准接口(如OutputPin trait)。它告诉管家:"要打开或关闭设备,你需要遵循这些规则。"这使得不同的硬件管理者都能按照统一的方式工作。
它们的配合是这样的:microbit-v2这位专业的管家,通过embedded-hal提供的标准方法来控制硬件。当我们想要点亮LED时,管家就会使用embedded-hal定义的OutputPin trait来完成这项工作。
要点亮LED,除了管家和标准操作手册外,还需要具体执行工作的团队:实现embedded-hal的针对nRF52833平台的"项目经理"nrf52833-hal,以及项目经理所依赖的"专业技工"nrf52833-pac。
BSP、embedded-hal、HAL和PAC之间到底是什么关系?
让我们先看看这个团队中每个成员的职责:
main()函数- 作为程序的主控制者,负责发出指令
- 决定开发板的初始化时机和LED矩阵的控制方式
- 直接与
microbit-v2交互
microbit-v2(Board Support Crate,又称Board Support Package,BSP)板级支持包- 担任micro:bit v2开发板的专属管理者
- 掌握LED矩阵、按钮等所有设备的位置信息
- 通过
embedded-hal和nrf52833-hal执行具体操作
embedded-hal(Hardware Abstraction Layer,HAL)平台无关的硬件抽象层- 定义设备操作的标准规范
- 提供
OutputPin等通用接口 - 统一不同设备的控制方式
nrf52833-hal(Hardware Abstraction Layer,HAL)针对nRF52833平台的硬件抽象层- 作为nRF52833芯片的协调者,专注于功能实现,向PAC层发送指令
- 遵循并实现
embedded-hal的标准规范 - 提供安全的操作接口
nrf52833-pac(Peripheral Access Crate,PAC)针对nRF52833平台的外设访问包- 作为nRF52833芯片的底层执行者,负责具体硬件操作
- 管理设备的物理地址映射
- 提供最基础的硬件控制功能
这些组件之间的关系,可以用下面的UML类图来表示,如图2:
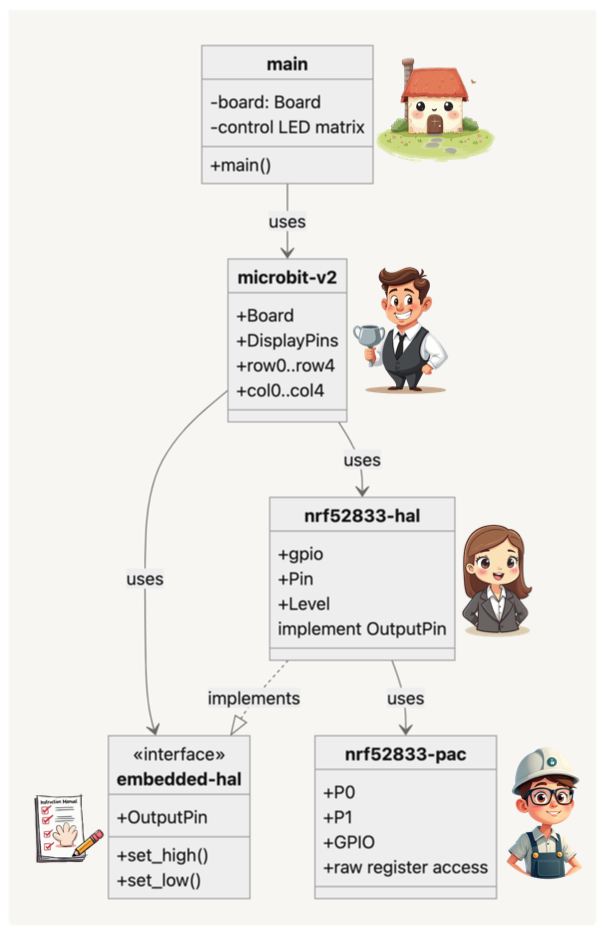
图2 BSP、embedded-hal、HAL和PAC之间的关系
让我们详细看看这张 UML 类图的架构设计。这是一个典型的嵌入式系统分层架构,从应用层到硬件访问层层层递进。
从顶层开始:
- 应用层(main,好比宅子的主人)是用户代码所在的位置,它通过调用 Board 接口来控制 LED 矩阵,而无需关心底层实现细节。
- 板级支持包(
microbit-v2,好比管家)作为一个适配层,将开发板的具体硬件(如 LED 矩阵的行列引脚)封装成易用的接口。它依赖embedded-hal接口来操作 GPIO,这种设计使板级支持包可以适配任何实现了embedded-hal接口的硬件平台。 - 硬件抽象层接口(
embedded-hal,好比平台无关操作手册)定义了标准的硬件操作接口(如OutputPin)。这是实现跨平台兼容的关键,它声明了set_high()和set_low()等基本 GPIO 操作。 - 硬件抽象层实现(
nrf52833-hal,好比nRF52833 芯片的项目经理)为 nRF52833 芯片实现了embedded-hal接口。它负责将抽象的 GPIO 操作转换为对应的寄存器操作,同时提供安全的访问机制。 - 外设访问层(
nrf52833-pac,好比nRF52833 芯片的专业技工)提供最底层的寄存器访问功能,直接与硬件交互。它封装了硬件寄存器的读写操作,但通常不建议上层直接使用。
这种分层设计的优势在于:
- 通过
embedded-hal接口实现硬件抽象,使应用代码可以轻松移植到其他平台 - BSP 层将底层的 GPIO 操作转换为更符合应用需求的 LED 矩阵控制接口
- 层层封装降低了直接操作硬件的风险,提供了更安全的开发环境
- 每层职责明确,便于代码维护和单元测试
图中的依赖关系清晰地展示了各层之间的交互方式:实线箭头表示"使用"关系,虚线空心箭头表示"实现"关系。这种设计既保持了良好的解耦性,又能充分利用硬件特性。
🧠什么是GPIO?
💡这是嵌入式系统中的基础硬件接口,全称是General Purpose Input/Output(通用输入/输出接口),主要用于实现数字信号的输入和输出。
它的主要特点和作用如下:
- 它具有出色的可编程性。每个GPIO引脚都像一个灵活的开关,可以根据需要设置为输入或输出模式。
- 在输入模式下,它就像一个细心的侦察兵,可以读取各种外部信号,比如按钮按下状态或传感器状态变化。
- 在输出模式下,它则成为一个指挥官,可以控制外部设备的行为,无论是点亮LED灯还是驱动马达。
- 在输出模式下,GPIO能够输出两种数字电平,如同开关的两种状态:
- 高电平相当于"开"的状态,通常是3.3V或5V的电压
- 低电平相当于"关"的状态,通常是0V或接地
在我们的UML图中,你可以看到micro:bit v2开发板如何巧妙运用GPIO。每个LED都像一个小灯泡,通过行引脚和列引脚的配合来控制。通过适当调整这些GPIO引脚的电平,就能实现对特定LED的精确控制,让它在我们的指令下亮起或熄灭。
🧠如何快速验证BSP、embedded-hal、HAL和PAC之间的依赖关系?
💡这张UML图中的依赖关系,可以通过运行cargo tree(显示当前项目的依赖关系树)命令来验证:
% cargo tree
lu1l v0.1.0 (/Users/<your-username>/learn-rust-by-games/ch01/lu1l)
# main使用cortex-m-rt
├── cortex-m-rt v0.7.5
(其他行略)
# main使用embedded-hal
├── embedded-hal v1.0.0
# main使用microbit-v2
├── microbit-v2 v0.15.1
│ └── microbit-common v0.15.1
# microbit-v2使用embedded-hal接口
│ ├── embedded-hal v1.0.0
# microbit-v2通过embedded-hal接口使用注入的nrf52833-hal
│ ├── nrf52833-hal v0.18.0
│ │ ├── nrf-hal-common v0.18.0
(其他行略)
# nrf52833-hal实现了embedded-hal接口
│ │ │ ├── embedded-hal v1.0.0
(其他行略)
# nrf52833-hal使用nrf52833-pac
│ │ └── nrf52833-pac v0.12.2 (*)
│ └── tiny-led-matrix v1.0.2
# main使用panic-halt
└── panic-halt v0.2.0BSP、HAL、embedded-hal 和 PAC 是如何协作点亮 LED 的?
理解了上述概念,现在可以聊聊Rust代码是如何通过层层配合来点亮LED灯的精彩历程。这是一段从顶层到底层的探索之旅。
一切始于最顶层的main函数。这里,我们遇到第一位重要角色:Board对象。通过一行简洁的代码:
let mut board = Board::take().unwrap();我们创建了这个与硬件交互的核心接口,它就像一扇通向硬件世界的大门。
接着,我们来到microbit-v2这一层。这里是为micro:bit v2精心打造的控制中心,包含了Board总控制台、DisplayPins显示控制面板,以及整齐排列的row0到row4和col0到col4引脚开关。在这里,我们可以执行如下操作:
board.display_pins.col4.set_low().unwrap();
board.display_pins.row4.set_high().unwrap();再往下,我们来到embedded-hal接口层。这是一个关键的抽象层,它定义了标准的硬件操作接口。通过定义OutputPin trait,它规定了所有输出引脚都必须实现set_high()和set_low()等基本方法。这种统一的接口设计确保了代码的可移植性。
nrf52833-hal层则负责实现这些接口。它通过gpio(通用输入输出控制)、Pin(引脚抽象)和Level(电平控制)等组件,将embedded-hal定义的抽象接口转换为具体的硬件操作。当我们调用set_high()或set_low()时,正是这一层在处理具体的实现细节。
最后来到最底层的nrf52833-pac。这里直接与硬件对话,配备着GPIO寄存器操作员、物理引脚控制器和底层寄存器访问工具。
整个点亮LED的过程就像一场精密的接力赛:从创建Board实例开始,经过display_pins精确定位,通过OutputPin接口发出指令,由hal层转换为具体操作,最终经pac层写入硬件寄存器。就这样,LED矩阵(4,4)位置的一个小灯被点亮了。这种层层递进的设计就像一台精密的机器,每个零件都扮演着独特而重要的角色,共同完成这个看似简单的点灯任务。
如果喜欢这篇文章,别忘了给文章点个“赞”,好鼓励小吾继续写哦~😃
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号