无人机电调全技术解析:从电路设计、控制原理到运维实战
原创
无人机电调全技术解析:从电路设计、控制原理到运维实战
原创
CKESC南昌长空科技
发布于 2025-03-24 14:53:07
发布于 2025-03-24 14:53:07
一、电调核心电路设计解析
1. 核心组件
MOSFET 功率模块:
采用 N 沟道增强型 MOSFET(如 IRF3205、FDP3688),导通电阻(Rds (on))决定效率(典型值 1-10mΩ)。
并联设计(2-6 颗):分摊电流,降低发热
MCU 控制单元:
主流方案:ARM Cortex-M0(如 STM32F030)、专用 ESC 芯片(如 Atmel ATmega8)。
集成功能:PWM 信号解析、PID 调速算法、保护逻辑(16-32 位处理器为主)。
驱动电路:
图腾柱结构(如 IR2104 驱动芯片):提供足够栅极驱动电流(>2A),确保 MOSFET 快速开关。
死区时间控制:防止上下桥臂直通(典型死区时间 200-500ns)。
电源管理:
BEC(电池 eliminator circuit):5V/3A 线性稳压(传统)或 DCDC 降压(高效),为飞控供电。
反向保护:肖特基二极管(如 MBR20100)防止电池反接。
通信接口:
主流协议:PWM(1-2ms 信号)、PPM(多通道串行)、CAN(如 UART 转 CAN 模块)。
高阶:Oneshot125/42(减少延迟,支持高速响应)、DShot(数字信号,抗干扰强)。
2. 保护电路设计
过流保护(OCP):
采样电阻(0.1mΩ-1mΩ)+ 比较器(LM393),触发阈值 1.2-1.5 倍额定电流(例:60A 电调触发点 72-90A)。
过压保护(OVP):
分压电路检测电池电压,6S 锂电上限 25.2V(每串 4.2V),触发后切断输出。
过热保护(OTP):
NTC 热敏电阻(10kΩ@25℃)监测 MOSFET 温度,阈值 85-100℃(根据封装散热设计)。
失控保护(Failsafe):
检测 PWM 信号丢失(>1 秒),执行刹车或悬停逻辑(可通过调参软件配置)。
3. 硬件优化设计
散热结构:
铝制散热片(鳍片高度 5-10mm)+ 导热硅脂(如信越 7783),热阻 < 2℃/W。
风道设计:预留进风口(配合无人机机架气流),降低 5-10℃温升。
EMI 抑制:
输入滤波:100μF 电解电容 + 100nF 陶瓷电容,抑制高频噪声。
屏蔽层:信号排线采用屏蔽双绞线(STP),降低对飞控的干扰。
二、电调工作原理深度解析
1. 信号处理流程
PWM 信号解析:
周期 20ms(50Hz),有效脉宽 1-2ms(对应 0-100% 油门)。
死区处理:滤除 <0.9ms 和> 2.1ms 的异常信号(防误触发)。
PID 调速算法:
比例(P):快速响应油门变化(P 系数 0.1-10)。
积分(I):消除稳态误差(I 系数 0.01-1)。
微分(D):抑制超调(D 系数 0.01-0.1)。
例:穿越机电调采用高 P 值(5-8),提高瞬间加速响应。
三相逆变控制:
六步换向法:每 60° 电角度切换 MOSFET 导通组合(如 A+BC-→AB+C-)。
换相延迟补偿:根据电机转速动态调整,避免换相转矩脉动。
2. 效率优化技术
同步整流:
下桥臂 MOSFET 同步导通,降低体二极管损耗(效率提升 3-5%)。
PWM 频率选择:
常规 20-50kHz(兼顾 MOSFET 开关损耗和电机噪音),竞速机可选 100kHz(减少转矩脉动)。
电池匹配:
内阻计算:电池内阻(mΩ)+ 电调内阻(mΩ)< 电机内阻(mΩ)×0.5(避免电压跌落)。
例:6S 5000mAh 电池(内阻 15mΩ)+ 电调内阻 5mΩ,匹配电机内阻 > 40mΩ。
三、电调使用全流程指南
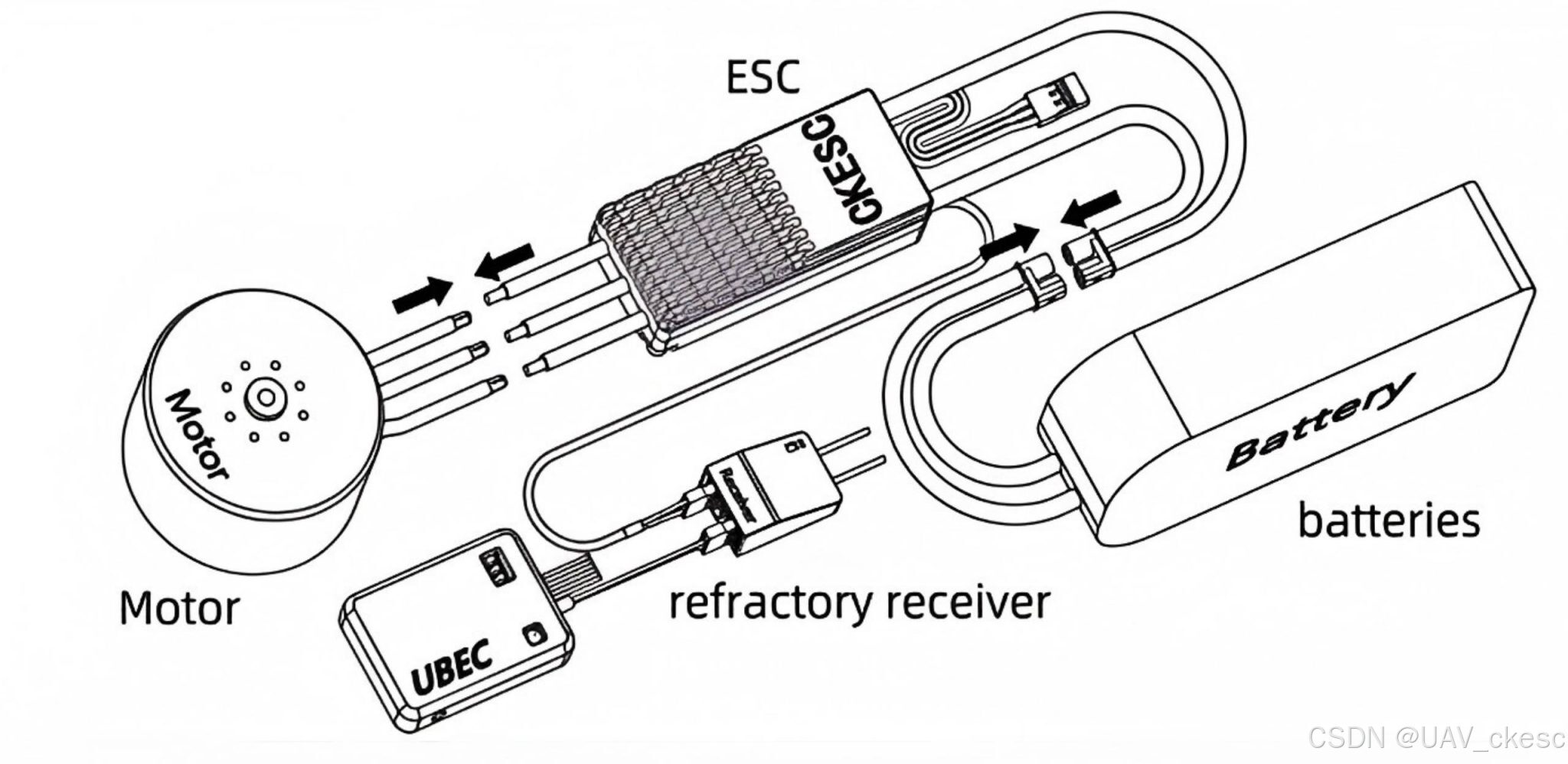
1. 安装与接线
硬件连接:
电机:三相线(无顺序,首次通电测试转向,反接任意两相)。
电池:红线(+)、黑线(-),线径选择(10AWG 对应 100A 持续电流)。
信号:3 芯线(5V/GND/SIG),长度 < 30cm(防信号衰减)。
焊接工艺:
镀锡处理:使用 95% 锡 + 5% 银焊丝(熔点 221℃),焊点饱满无虚焊。
绝缘处理:热缩管(内径 2-3mm)+ 硅胶密封(防潮湿)。
2. 校准与配置
油门行程校准(以 PWM 为例):
上电同时推满油门(2ms 信号),听到第一声滴响。
下拉油门至最低(1ms 信号),第二声滴响确认。
验证:油门杆对应电机转速线性响应。
调参软件配置(以 BLHeli32 为例):
启动模式:软启动(适合多旋翼)/ 硬启动(适合固定翼)。
刹车模式:标准刹车(能耗制动)/ 急刹车(反电动势制动,需硬件支持)。
锂电节数:设置 Lipo Cell(2S-6S),启用低压保护(每串 2.8V 截止)。
3. 与飞控匹配
协议选择:
穿越机:DShot600(600μs 更新周期),延迟 < 1ms。
航拍机:Oneshot42(42μs 周期),兼容主流飞控(如 Betaflight、INAV)。
固件升级:
使用 USB 转 TTL 工具(如 CP2102),注意版本兼容性(BLHeli_S→BLHeli32 需擦除 EEPROM)。
四、维护保养与故障排查
1. 日常维护
散热管理:
温度监测:飞行后触摸电调散热片,烫手(>60℃)需优化风道。
散热改造:添加散热风扇(5V 0.3A,风量 10CFM),降低 15-20℃。
连接检查:
端子氧化:用酒精擦拭香蕉头,涂抹导电膏(如 MG Chemicals 845)。
线材磨损:定期更换硅胶线(每 50 次飞行检查),防止短路。
2. 故障诊断
故障现象 可能原因 解决方案
电调无响应 BEC 损坏 外接 UBEC(5V/5A)替代
电机抖动 相位线接触不良 重新焊接,使用航空插头(XT60)
过热保护触发 散热不足 / 负载过大 增加散热片,检查电机桨叶匹配
油门失控 信号干扰 更换屏蔽线,远离电机布线
3. 存储注意事项
放电保存:长期存储电压 3.85V/Cell(使用放电管家),每月检查一次。
防潮处理:放置硅胶干燥剂(湿度 < 40%),避免 PCB 氧化。
五、进阶知识与行业趋势
1. 电调类型与应用
SimonK 固件:开源方案,支持自定义参数(如混控模式),适合 DIY。
UBL 电调:无 BEC 设计,适合高压系统(12S 以上),需独立供电。
智能电调(如 CKESC ROCK400A -M CAN):
集成电流传感器(精度 ±1%),实时功率监测。
支持 CAN 总线,与飞控共享数据(减少信号线)
高可靠稳定性。
2. 前沿技术
碳化硅(SiC)MOSFET:
优势:开关损耗降低 70%,工作温度提升至 150℃,适合 200A 以上系统。
应用:竞速无人机(如 DYS HD200),效率提升 8-10%。
无线电调(如 Hitec Optima 120):
2.4GHz 无线通信,摆脱信号线,支持 OTA 固件升级。
3. 未来趋势
高度集成化:电调与 ESC-BEC - 飞控一体化(如 Matek F722-Wing)。
AI 算法嵌入:实时监测电机健康状态,预测故障(如轴承磨损预警)。
高压化(24S 以上):配合高 KV 电机,实现极速(ROCK 220A-H)。
六、安全操作规范
上电顺序:先接飞控,后接电池;断电反之。
负载测试:首次通电空载运行 10 秒,检查电机转向和发热。
冗余设计:重要任务使用双电调备份(如六旋翼双电调驱动单电机)。
环境限制:避免在雨天(IP64 以下电调)、粉尘环境(需防尘罩)使用。
附录:常用工具与配件
调试工具:BLHeli Configurator(PC 端)、Flippy(手机 APP,蓝牙连接)。
测试设备:示波器(测量 PWM 波形)、电子负载(模拟电机负载)。
耗材:导热硅脂、高温胶带(3M 5415)、防打火电容(1000μF/63V)。
通过以上内容,用户可全面掌握电调从设计原理到实战维护的全流程知识。建议根据具体应用场景(如穿越机、航拍机、工业无人机)选择对应电调型号,并定期更新固件以获取最新功能(如支持新电池协议、优化调速算法)。对于专业级应用,推荐使用示波器和功率分析仪进行深度调试,确保系统稳定性与效率最大化。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号