webots续集2

webots续集2

懒洋洋
发布于 2025-11-15 10:56:12
发布于 2025-11-15 10:56:12
上次我发现他的动作真的很奇怪,那我们咋整,其实就是看看实际的传感器数据的值,以及他的逻辑问题,我们首先先看他的代码逻辑,那就上代码了,大佬可直接忽略
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <webots/device.h>
#include <webots/distance_sensor.h>
#include <webots/led.h>
#include <webots/motor.h>
#include <webots/nodes.h>
#include <webots/robot.h>
/* Device stuff */
#define DISTANCE_SENSORS_NUMBER 8
static WbDeviceTag distance_sensors[DISTANCE_SENSORS_NUMBER];
static double distance_sensors_values[DISTANCE_SENSORS_NUMBER];
static const char *distance_sensors_names[DISTANCE_SENSORS_NUMBER] = {"ps0", "ps1", "ps2", "ps3", "ps4", "ps5", "ps6", "ps7"};
#define GROUND_SENSORS_NUMBER 3
static WbDeviceTag ground_sensors[GROUND_SENSORS_NUMBER];
static double ground_sensors_values[GROUND_SENSORS_NUMBER] = {0.0, 0.0, 0.0};
static const char *ground_sensors_names[GROUND_SENSORS_NUMBER] = {"gs0", "gs1", "gs2"};
#define LEDS_NUMBER 10
static WbDeviceTag leds[LEDS_NUMBER];
static bool leds_values[LEDS_NUMBER];
static const char *leds_names[LEDS_NUMBER] = {"led0", "led1", "led2", "led3", "led4", "led5", "led6", "led7", "led8", "led9"};
static WbDeviceTag left_motor, right_motor;
#define LEFT 0
#define RIGHT 1
#define MAX_SPEED 6.28*2
static double speeds[2];
/* Breitenberg stuff */
static double weights[DISTANCE_SENSORS_NUMBER][2] = {{-1.3, -1.0}, {-1.3, -1.0}, {-0.5, 0.5}, {0.0, 0.0},
{0.0, 0.0}, {0.05, -0.5}, {-0.75, 0}, {-0.75, 0}};
static double offsets[2] = {0.5 * MAX_SPEED, 0.5 * MAX_SPEED};
static int get_time_step() {
static int time_step = -1;
if (time_step == -1)
time_step = (int)wb_robot_get_basic_time_step();
return time_step;
}
static void step() {
if (wb_robot_step(get_time_step()) == -1) {
wb_robot_cleanup();
exit(EXIT_SUCCESS);
}
}
static void passive_wait(double sec) {
double start_time = wb_robot_get_time();
do {
step();
} while (start_time + sec > wb_robot_get_time());
}
static void init_devices() {
int i;
for (i = 0; i < DISTANCE_SENSORS_NUMBER; i++) {
distance_sensors[i] = wb_robot_get_device(distance_sensors_names[i]);
wb_distance_sensor_enable(distance_sensors[i], get_time_step());
}
for (i = 0; i < LEDS_NUMBER; i++)
leds[i] = wb_robot_get_device(leds_names[i]);
// silently initialize the ground sensors if they exists
for (i = 0; i < GROUND_SENSORS_NUMBER; i++)
ground_sensors[i] = (WbDeviceTag)0;
int ndevices = wb_robot_get_number_of_devices();
for (i = 0; i < ndevices; i++) {
WbDeviceTag dtag = wb_robot_get_device_by_index(i);
const char *dname = wb_device_get_name(dtag);
WbNodeType dtype = wb_device_get_node_type(dtag);
if (dtype == WB_NODE_DISTANCE_SENSOR && strlen(dname) == 3 && dname[0] == 'g' && dname[1] == 's') {
int id = dname[2] - '0';
if (id >= 0 && id < GROUND_SENSORS_NUMBER) {
ground_sensors[id] = wb_robot_get_device(ground_sensors_names[id]);
wb_distance_sensor_enable(ground_sensors[id], get_time_step());
}
}
}
// get a handler to the motors and set target position to infinity (speed control).
left_motor = wb_robot_get_device("left wheel motor");
right_motor = wb_robot_get_device("right wheel motor");
wb_motor_set_position(left_motor, INFINITY);
wb_motor_set_position(right_motor, INFINITY);
wb_motor_set_velocity(left_motor, 0.0);
wb_motor_set_velocity(right_motor, 0.0);
step();
}
static void reset_actuator_values() {
int i;
for (i = 0; i < 2; i++)
speeds[i] = 0.0;
for (i = 0; i < LEDS_NUMBER; i++)
leds_values[i] = false;
}
static void get_sensor_input() {
int i;
for (i = 0; i < DISTANCE_SENSORS_NUMBER; i++) {
distance_sensors_values[i] = wb_distance_sensor_get_value(distance_sensors[i]);
// scale the data in order to have a value between 0.0 and 1.0
// 1.0 representing something to avoid, 0.0 representing nothing to avoid
distance_sensors_values[i] /= 4096;
}
for (i = 0; i < GROUND_SENSORS_NUMBER; i++) {
if (ground_sensors[i])
ground_sensors_values[i] = wb_distance_sensor_get_value(ground_sensors[i]);
}
}
static bool cliff_detected() {
int i;
for (i = 0; i < GROUND_SENSORS_NUMBER; i++) {
if (!ground_sensors[i])
return false;
if (ground_sensors_values[i] < 500.0)
return true;
}
return false;
}
static void set_actuators() {
int i;
for (i = 0; i < LEDS_NUMBER; i++)
wb_led_set(leds[i], leds_values[i]);
wb_motor_set_velocity(left_motor, speeds[LEFT]);
wb_motor_set_velocity(right_motor, speeds[RIGHT]);
}
static void blink_leds() {
static int counter = 0;
counter++;
leds_values[(counter / 10) % LEDS_NUMBER] = true;
}
static void run_braitenberg() {
int i, j;
for (i = 0; i < 2; i++) {
speeds[i] = 0.0;
for (j = 0; j < DISTANCE_SENSORS_NUMBER; j++)
speeds[i] += distance_sensors_values[j] * weights[j][i];
speeds[i] = offsets[i] + speeds[i] * MAX_SPEED;
if (speeds[i] > MAX_SPEED)
speeds[i] = MAX_SPEED;
else if (speeds[i] < -MAX_SPEED)
speeds[i] = -MAX_SPEED;
}
}
static void go_backwards() {
wb_motor_set_velocity(left_motor, -MAX_SPEED);
wb_motor_set_velocity(right_motor, -MAX_SPEED);
passive_wait(0.2);
}
static void turn_left() {
wb_motor_set_velocity(left_motor, -MAX_SPEED);
wb_motor_set_velocity(right_motor, MAX_SPEED);
passive_wait(0.2);
}
int main(int argc, char **argv) {
wb_robot_init();
printf("Default controller of the e-puck robot started...\n");
init_devices();
while (true) {
reset_actuator_values();
get_sensor_input();
blink_leds();
if (cliff_detected()) {
go_backwards();
turn_left();
} else {
run_braitenberg();
}
set_actuators();
step();
};
return EXIT_SUCCESS;
}我先把他的整体代码贴上来,大致过一下
主要功能概述
- 初始化机器人设备(电机、传感器、LED)。
- 读取传感器值(避障和防止掉落)。
- 使用 Braitenberg 算法控制移动方向(避障行为)。
- 遇到悬崖(黑线)时倒退并左转。
- 循环控制机器人行为直到退出模拟。
别的大家就自己看看,一个个解释等下次吧
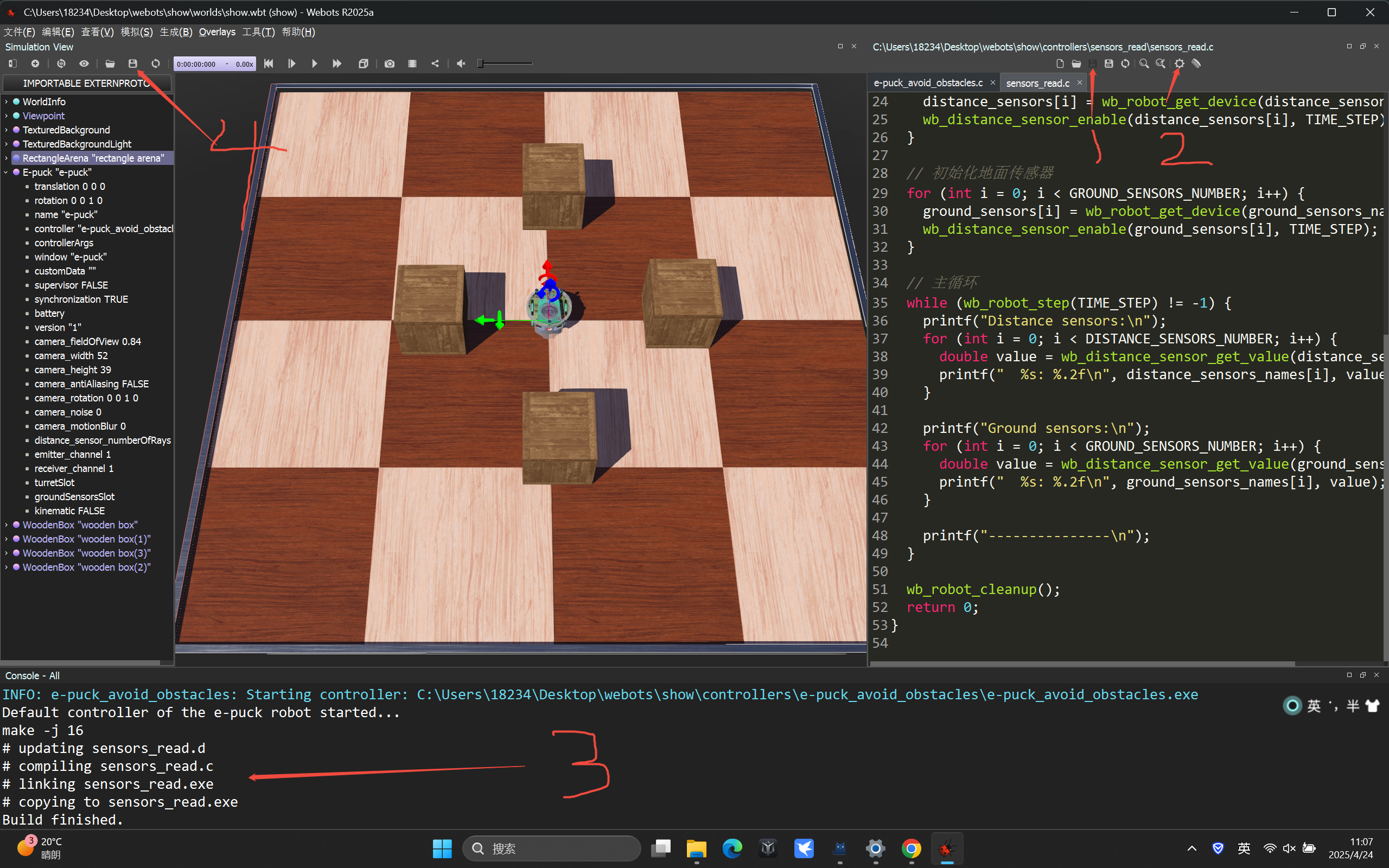
然后我就想着先测测传感器的值吧,我找了好久传感器在webots中的设置,找不到,是在他的元模型里面添加的,所以改不了,我们测一下他的传感器数值,新建一个控制器
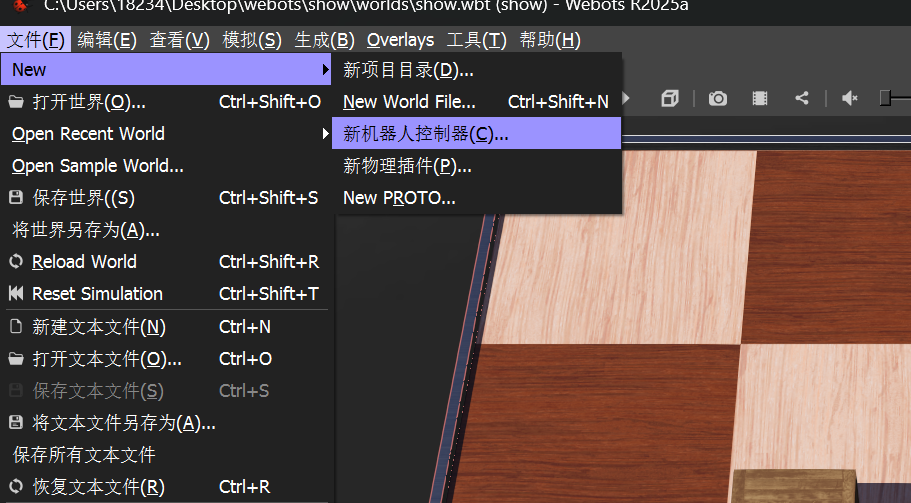
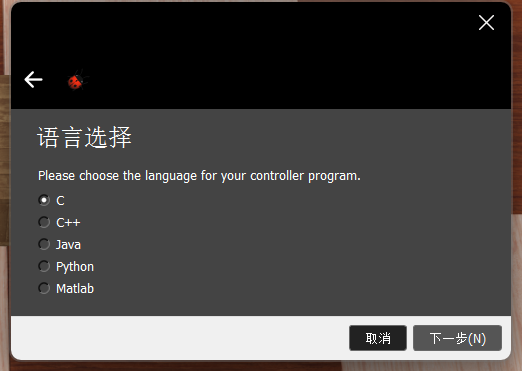
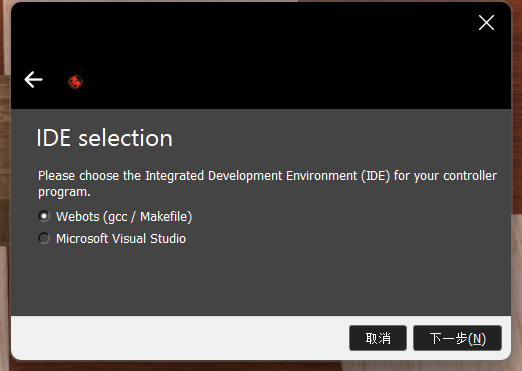
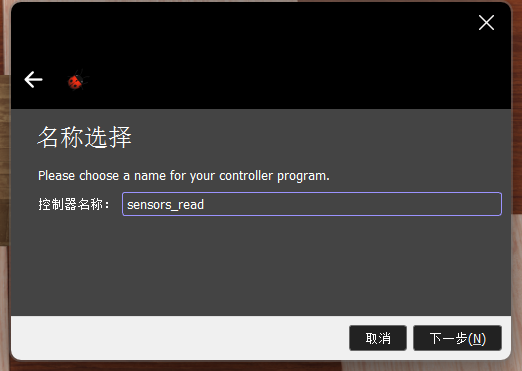

OK了
先把代码粘贴到新建文件中,代码如下
#include <stdio.h>
#include <webots/robot.h>
#include <webots/distance_sensor.h>
#define TIME_STEP 64 // e-puck 默认时间步
#define DISTANCE_SENSORS_NUMBER 8
#define GROUND_SENSORS_NUMBER 3
static WbDeviceTag distance_sensors[DISTANCE_SENSORS_NUMBER];
static const char *distance_sensors_names[DISTANCE_SENSORS_NUMBER] = {
"ps0", "ps1", "ps2", "ps3", "ps4", "ps5", "ps6", "ps7"
};
static WbDeviceTag ground_sensors[GROUND_SENSORS_NUMBER];
static const char *ground_sensors_names[GROUND_SENSORS_NUMBER] = {
"gs0", "gs1", "gs2"
};
int main() {
wb_robot_init();
// 初始化距离传感器
for (int i = 0; i < DISTANCE_SENSORS_NUMBER; i++) {
distance_sensors[i] = wb_robot_get_device(distance_sensors_names[i]);
wb_distance_sensor_enable(distance_sensors[i], TIME_STEP);
}
// 初始化地面传感器
for (int i = 0; i < GROUND_SENSORS_NUMBER; i++) {
ground_sensors[i] = wb_robot_get_device(ground_sensors_names[i]);
wb_distance_sensor_enable(ground_sensors[i], TIME_STEP);
}
// 主循环
while (wb_robot_step(TIME_STEP) != -1) {
printf("Distance sensors:\n");
for (int i = 0; i < DISTANCE_SENSORS_NUMBER; i++) {
double value = wb_distance_sensor_get_value(distance_sensors[i]);
printf(" %s: %.2f\n", distance_sensors_names[i], value);
}
printf("Ground sensors:\n");
for (int i = 0; i < GROUND_SENSORS_NUMBER; i++) {
double value = wb_distance_sensor_get_value(ground_sensors[i]);
printf(" %s: %.2f\n", ground_sensors_names[i], value);
}
printf("---------------\n");
}
wb_robot_cleanup();
return 0;
}
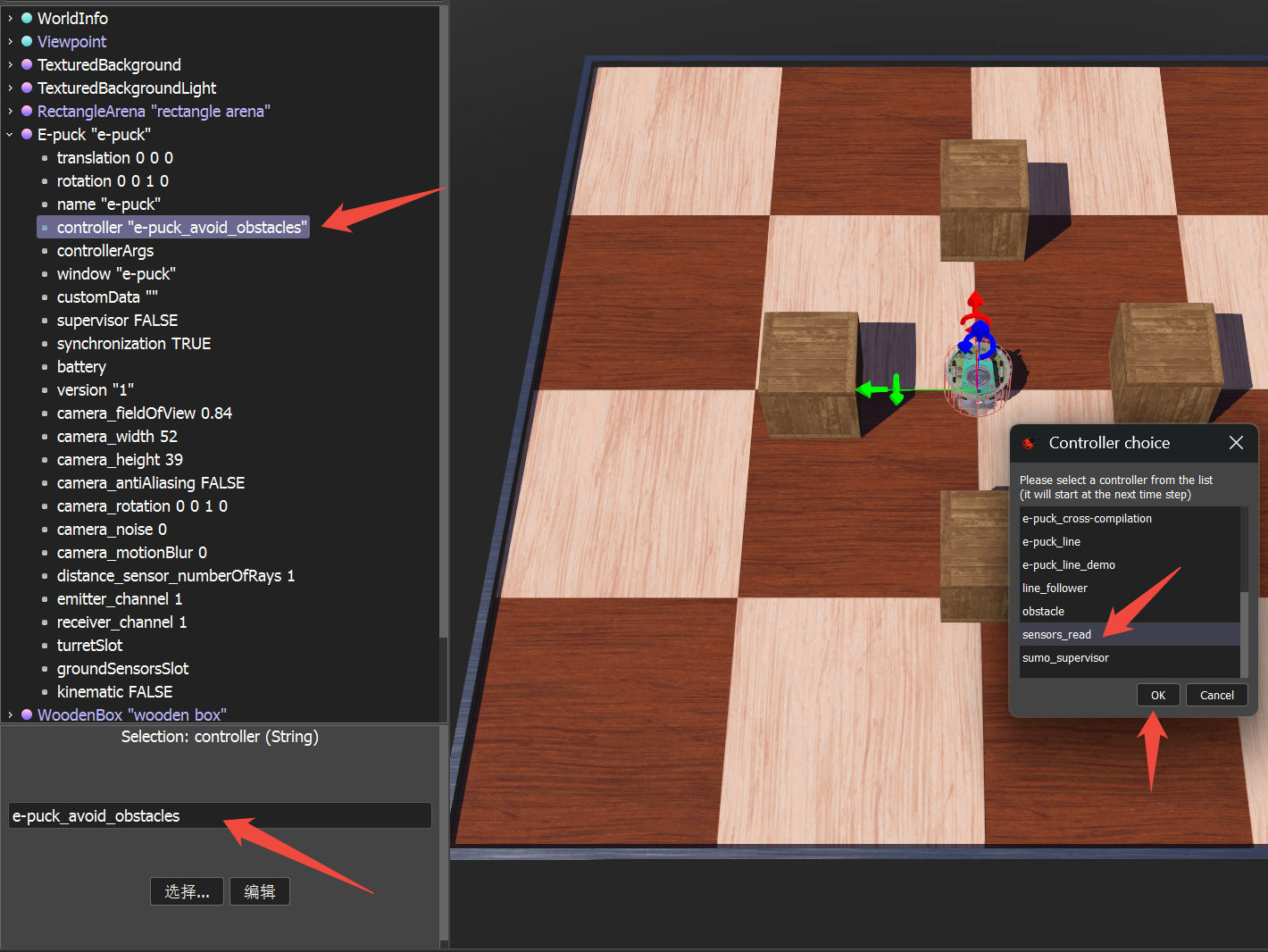
按图上编译保存,更换控制器
点击开始,下方开始打印信息,发现红色报警,
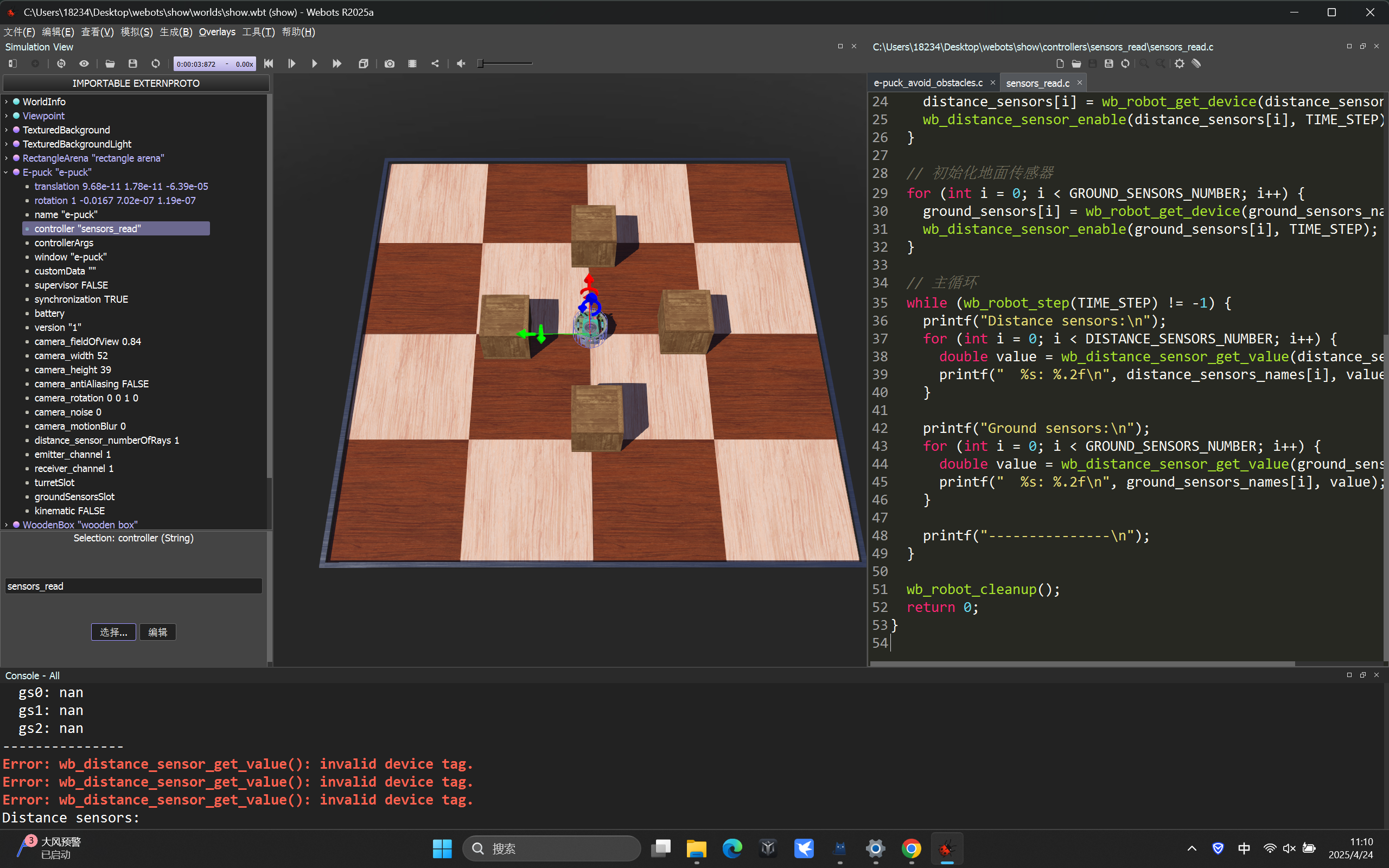
这个问题是说明你尝试从一个 未正确初始化或未启用的距离传感器(Distance Sensor)设备 中读取数据,也就是说:
-
wb_distance_sensor_get_value()使用的设备 tag 是无效的(NULL或未设置好); - 通常是由于:
- 没有使用
wb_robot_get_device()获取设备; - 或者获取了设备但没有用
wb_distance_sensor_enable()启用; - 获取设备名称拼写错误;
- 没有在 Webots 仿真场景中放入对应的传感器设备。
- 没有使用
咱们是看避障,地面传感器先不要了,简化一下程序,打印速度太快,改成一秒一次
#include <stdio.h>
#include <webots/robot.h>
#include <webots/distance_sensor.h>
#define TIME_STEP 64 // 每次 step 的时间,单位 ms
#define DISTANCE_SENSORS_NUMBER 8
static WbDeviceTag distance_sensors[DISTANCE_SENSORS_NUMBER];
static const char *distance_sensors_names[DISTANCE_SENSORS_NUMBER] = {
"ps0", "ps1", "ps2", "ps3", "ps4", "ps5", "ps6", "ps7"
};
int main() {
wb_robot_init();
for (int i = 0; i < DISTANCE_SENSORS_NUMBER; i++) {
distance_sensors[i] = wb_robot_get_device(distance_sensors_names[i]);
wb_distance_sensor_enable(distance_sensors[i], TIME_STEP);
}
// 新增:计数器
int counter = 0;
int steps_per_second = 1000 / TIME_STEP; // 一秒钟多少步
while (wb_robot_step(TIME_STEP) != -1) {
counter++;
// 每秒打印一次
if (counter >= steps_per_second) {
counter = 0;
printf("Distance sensors:\n");
for (int i = 0; i < DISTANCE_SENSORS_NUMBER; i++) {
double value = wb_distance_sensor_get_value(distance_sensors[i]);
printf(" %s: %.2f\n", distance_sensors_names[i], value);
}
printf("---------------\n");
}
}
wb_robot_cleanup();
return 0;
}粘贴到控制器中,重新编译,再次尝试
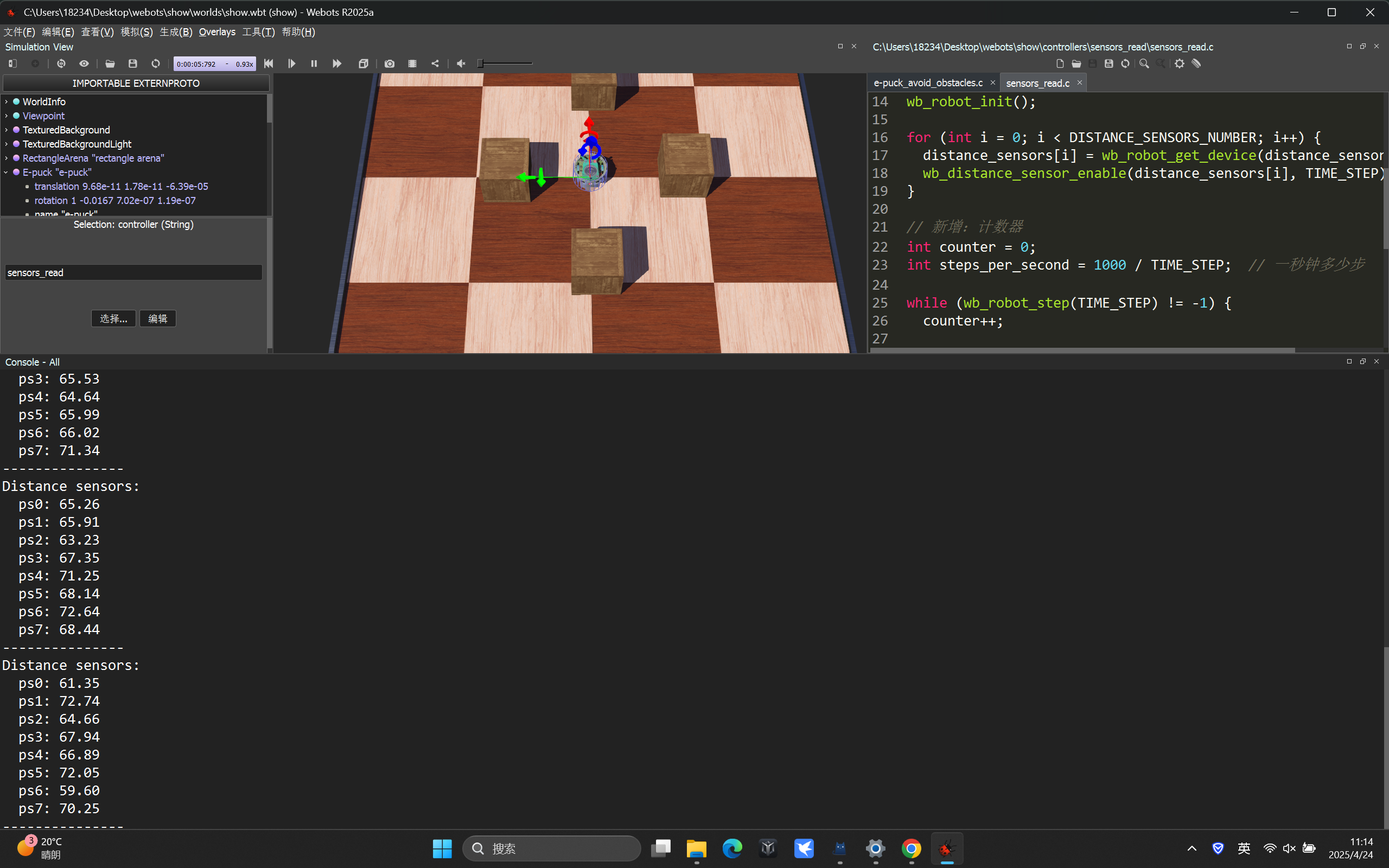
就可以了,然后这样就先可以通过控制器读数据了,那先这样,下次我们控制运动
本文参与 腾讯云自媒体同步曝光计划,分享自作者个人站点/博客。
原始发表:2025-11-14,如有侵权请联系 cloudcommunity@tencent.com 删除
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号