概述
开发机和任务式建模支持在创建过程中一键打开 Isaac Sim GUI 配置,用户仅需要进入开发机或者训练任务容器内运行相应指令即可进行 Isaac Sim 仿真直播。当前平台支持通过浏览器或者 WebRTC Streaming Client 客户端两种方式查看 GUI 直播。
前置准备
1. 购买渲染型 GPU 并纳管

2. 购买弹性公网 IP
对于1080P 30FPS 的仿真串流,大致需要 5-20Mbps 带宽,一般选择 50Mbps 即可。

3. 准备 CLB
3.1 购买 CLB
网络类型选择公网
IP 选择在第一步中申请的公网 IP
所属网络选择与纳管节点 CVM 相同的 VPC

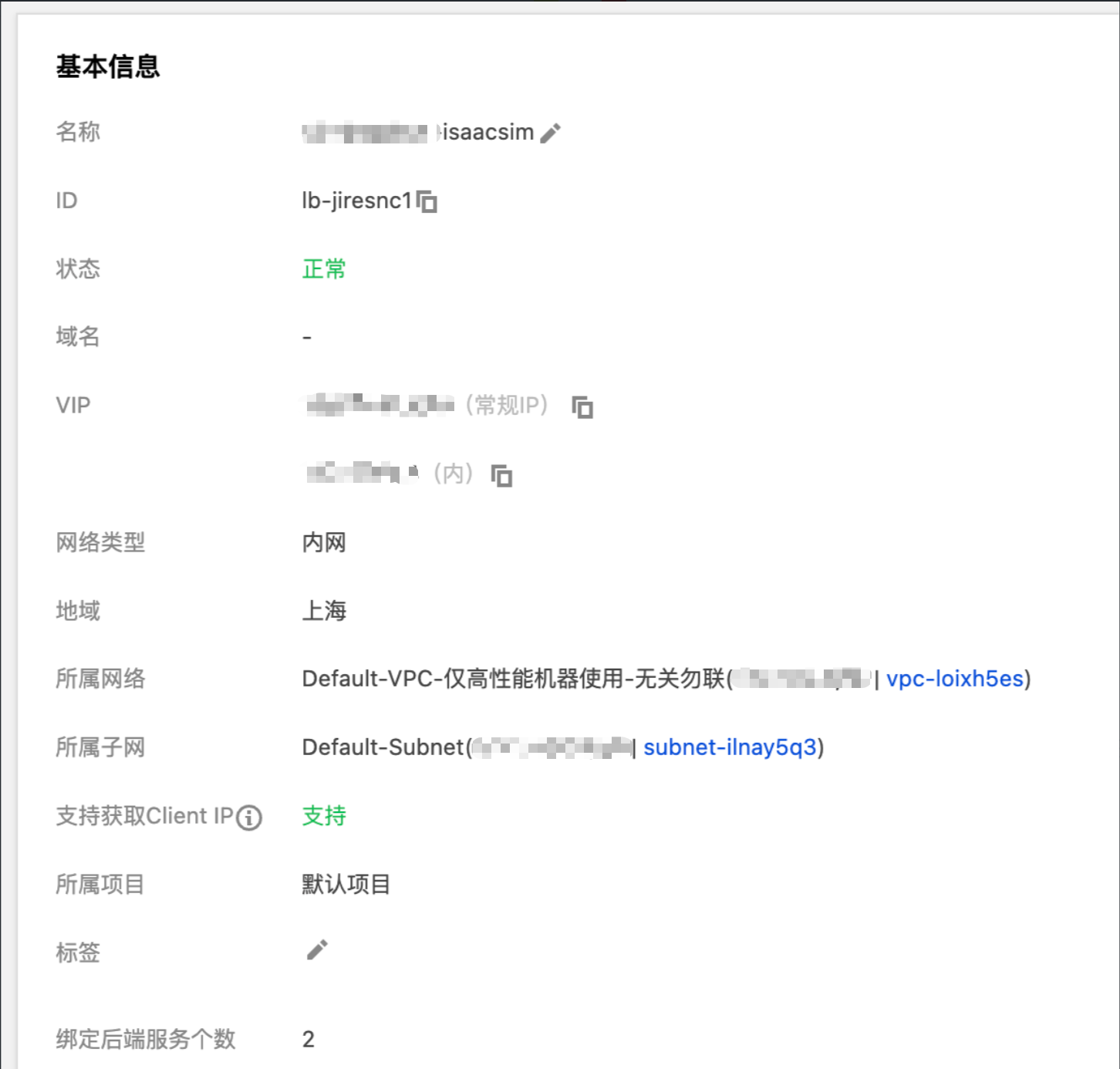
购买完成后的 CLB 如下:
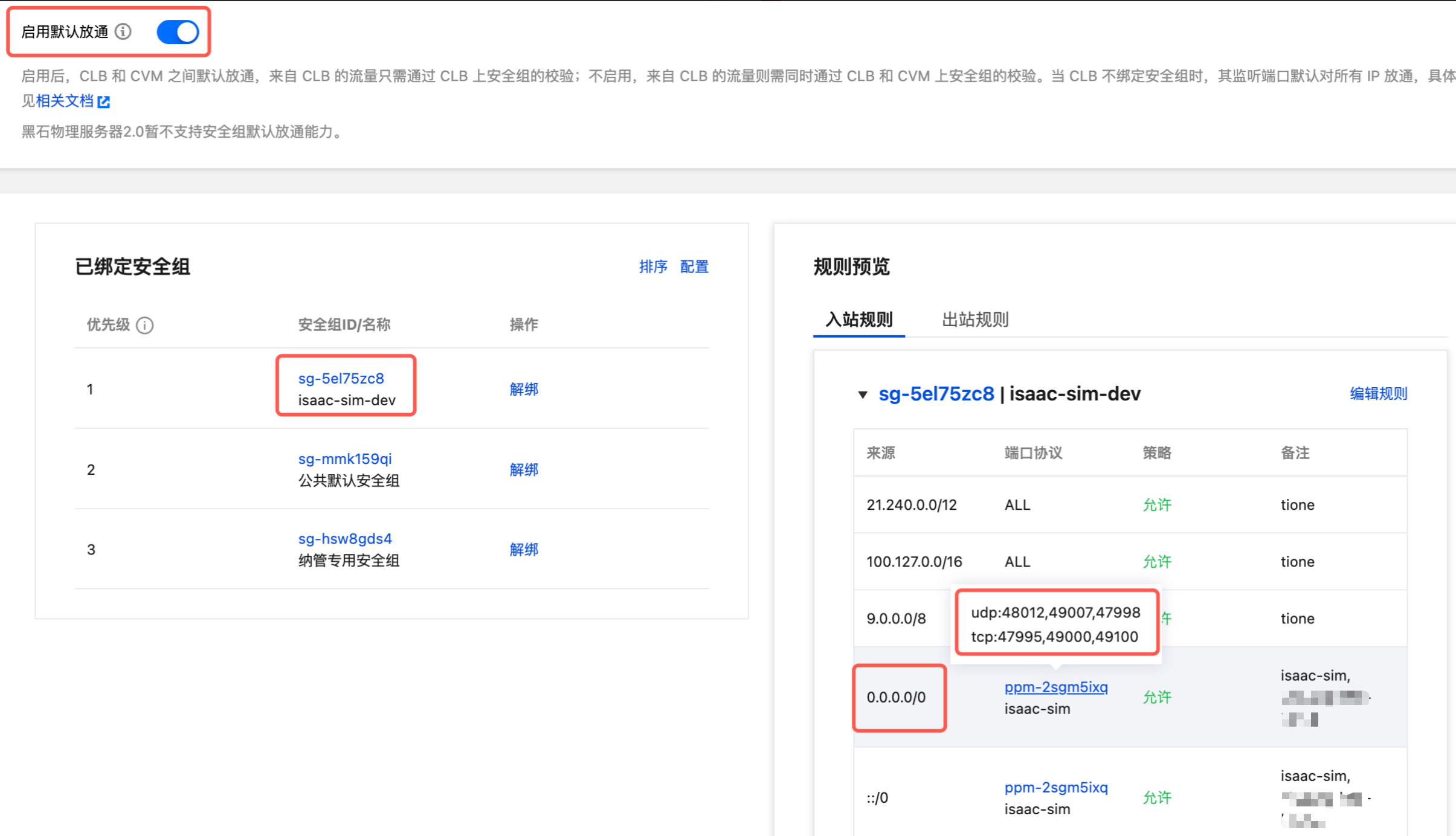
3.2 配置 CLB 安全组
配置示例:
4. 准备 Isaac Sim Assets(建议执行)
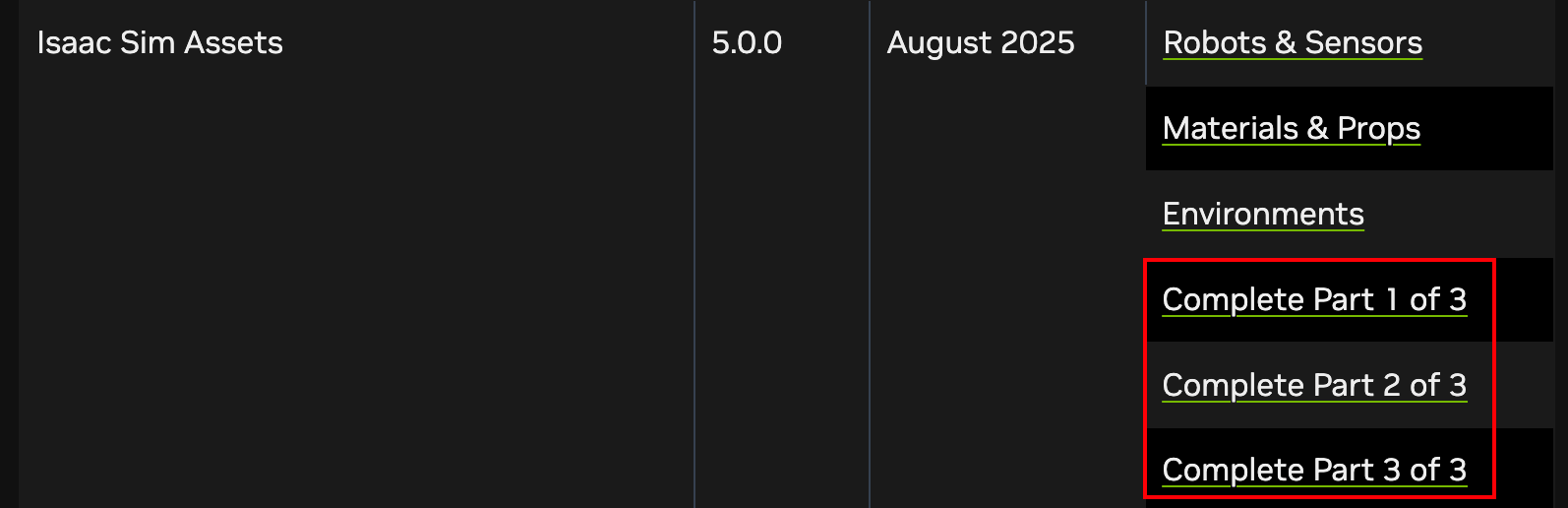
请通过官网下载:
Complete Part 1 of 3 (50GB):下载得到 isaac-sim-assets-complete-5.0.0.zip.001
Complete Part 2 of 3 (50GB):下载得到 isaac-sim-assets-complete-5.0.0.zip.002
Complete Part 3 of 3 (39.34GB):下载得到 isaac-sim-assets-complete-5.0.0.zip.003
解压方式:
# 假设下载好的文件全部在 /tmp 下面mv /tmp/isaac-sim-assets-complete-5.0.0.zip.* /workspace/IsaacLab/data/cd /workspace/IsaacLab/data/# 这里是分卷压缩、不是多个独立的 zip 文件,有两种解压方式,根据自己需要选择:# 方法 1(推荐):使用 7z 自动解压apt-get install p7zip-full -y# 解压第一个文件即可,7z 会自动解压剩下的文件7z x isaac-sim-assets-complete-5.0.0.zip.001# 方法 2:手动合并文件,生成一个 140G 左右的完整文件后用 zip 解压cat isaac-sim-assets-complete-5.0.0.zip.001 isaac-sim-assets-complete-5.0.0.zip.002 isaac-sim-assets-complete-5.0.0.zip.003 > isaac-sim-assets-complete-5.0.0.zipunzip "isaac-sim-assets-complete-5.0.0.zip"
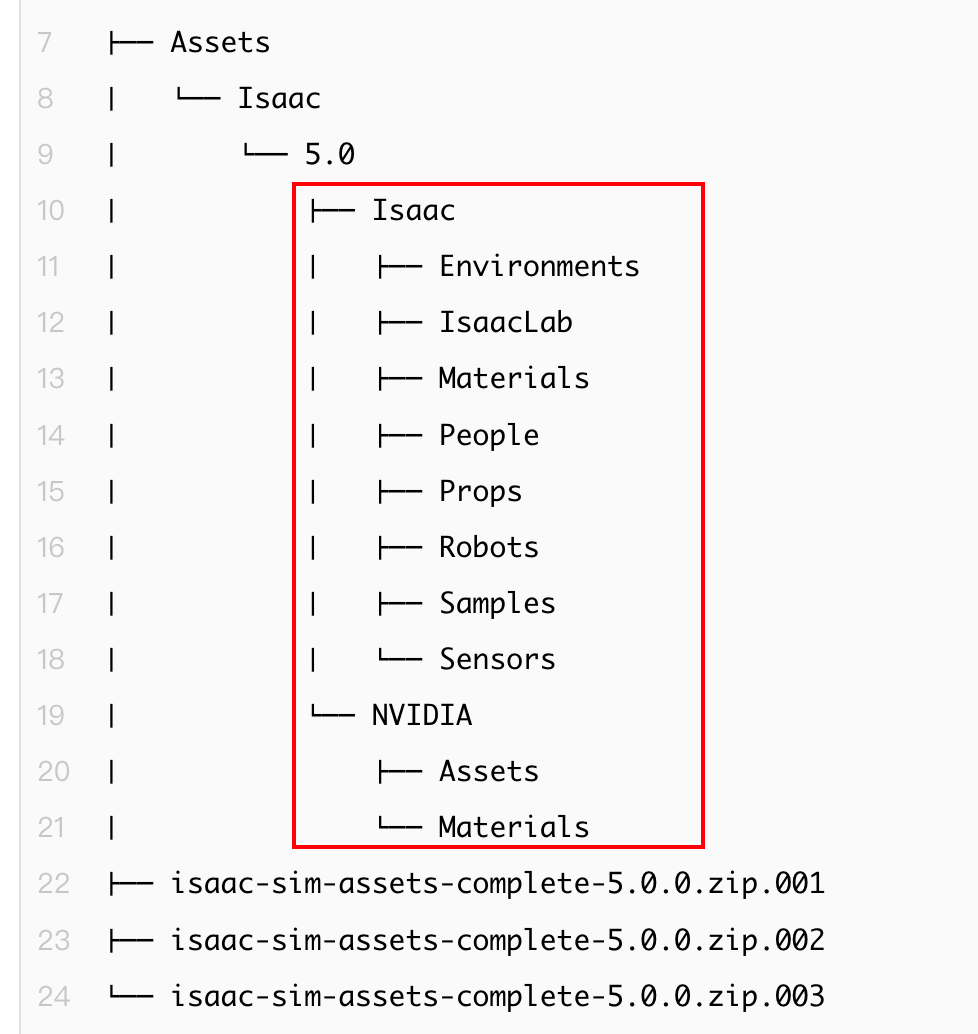
最终 /workspace/IsaacLab/data/ 目录结果如下:
total 140Gdrwxr-xr-x 3 root root 8.0K Aug 19 10:59 Assets-rw-r----- 1 root root 34G Aug 18 16:28 isaac-sim-assets-complete-5.0.0.zip.001-rw-r----- 1 root root 29G Aug 18 16:28 isaac-sim-assets-complete-5.0.0.zip.002-rw-r----- 1 root root 25G Aug 18 16:28 isaac-sim-assets-complete-5.0.0.zip.003.├── Assets│ └── Isaac│ └── 5.0│ ├── Isaac│ │ ├── Environments│ │ ├── IsaacLab│ │ ├── Materials│ │ ├── People│ │ ├── Props│ │ ├── Robots│ │ ├── Samples│ │ └── Sensors│ └── NVIDIA│ ├── Assets│ └── Materials├── isaac-sim-assets-complete-5.0.0.zip.001├── isaac-sim-assets-complete-5.0.0.zip.002└── isaac-sim-assets-complete-5.0.0.zip.003
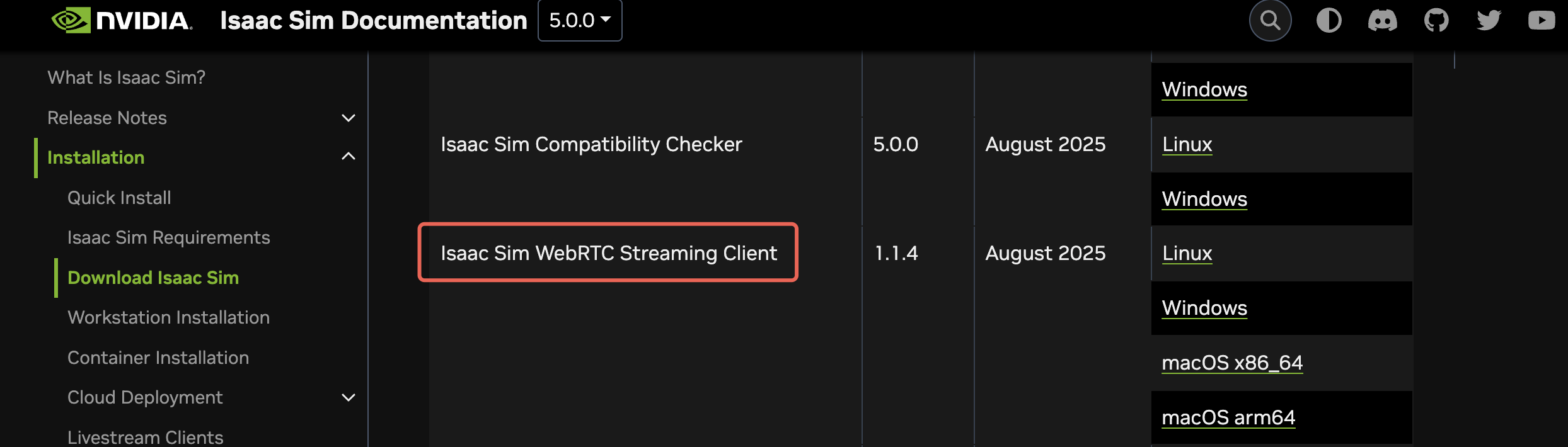
5. 安装 Isaac Sim WebRTC Streaming Client(该步骤为可选,也可以直接使用浏览器打开)
操作步骤
步骤1:创建开发机/任务式建模
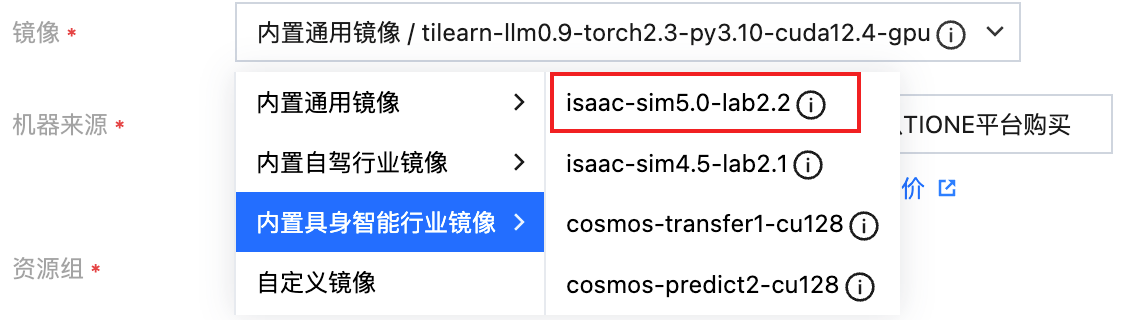
1. 在 TI-ONE 控制台 新建开发机/任务式建模,选择“内置具身智能行业镜像” > “isaac-sim5.0-lab2.2”。
资源配置:选择至少一卡 A10,CPU 至少4核,内存至少16GB
存储配置:
存储类型:CFS
源路径:选择 “准备工作-4. 准备 Assets” 中处理好的路径,例如
xxx/Assets容器挂载路径:自定义,例如
/workspace/IsaacLab/data/Assets
2. 进入高级设置,打开 Isaac Sim GUI 开关,开启后需要选择访问方式,默认为浏览器访问(通过浏览器访问 GUI 页面),也可以选择串流访问(通过 Isaac Sim WebRTC Streaming Client 访问 GUI 页面)。
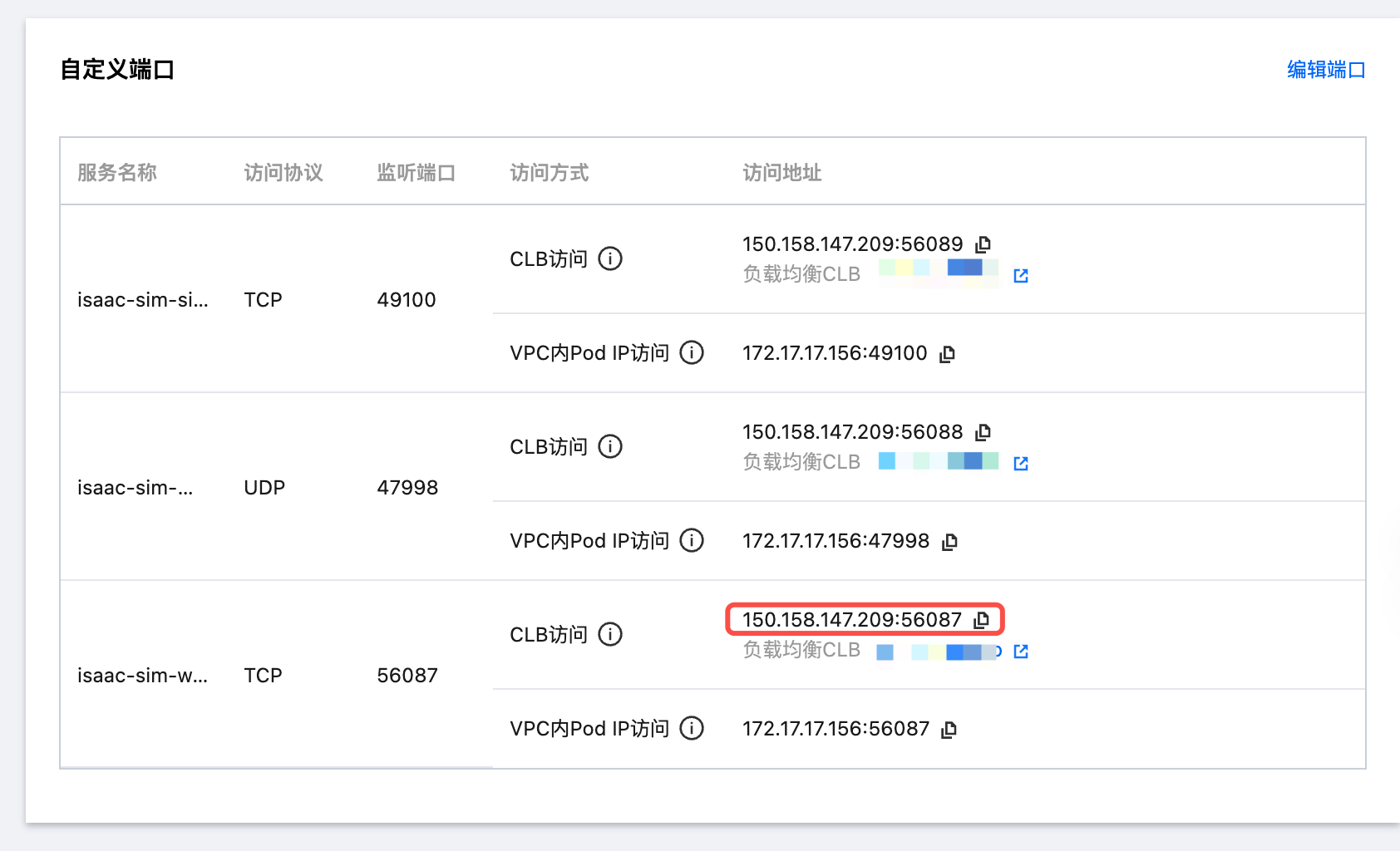
开启后若选择浏览器访问,则默认会展示三个自定义端口配置,如下所示:
服务名称:isaac-sim-signal;访问协议:TCP;监听端口:默认49100,不可修改;服务访问方式:CLB 访问;访问端口:此处为 CLB 暴露的端口,用户可自定义
服务名称:isaac-sim-media;访问协议:UDP;监听端口:默认47998,不可修改;服务访问方式:CLB 访问;访问端口:此处为 CLB 暴露的端口,用户可自定义
服务名称:isaac-sim-web;访问协议:TCP;监听端口:默认8080,可自定义修改;服务访问方式:CLB访问;访问端口:此处为 CLB 暴露的端口,用户可自定义

开启后若选择串流访问,则会默认展示两个自定义端口配置,如下图所示:
服务名称:isaac-sim-signal;访问协议:TCP;监听端口:默认49100,不可修改;服务访问方式:CLB 访问;访问端口:49100,不可修改
服务名称:isaac-sim-media;访问协议:UDP;监听端口:默认47998,不可修改;服务访问方式:CLB 访问;访问端口:47998,不可修改

3. 完成创建后,即可在开发机/任务式建模的详情页查看对应的 Isaac Sim GUI 服务的启动命令,如下图所示,实际使用的时候,您只需要将
<YOUR_ASSETS_PATH> 替换为 Assets 所在路径即可。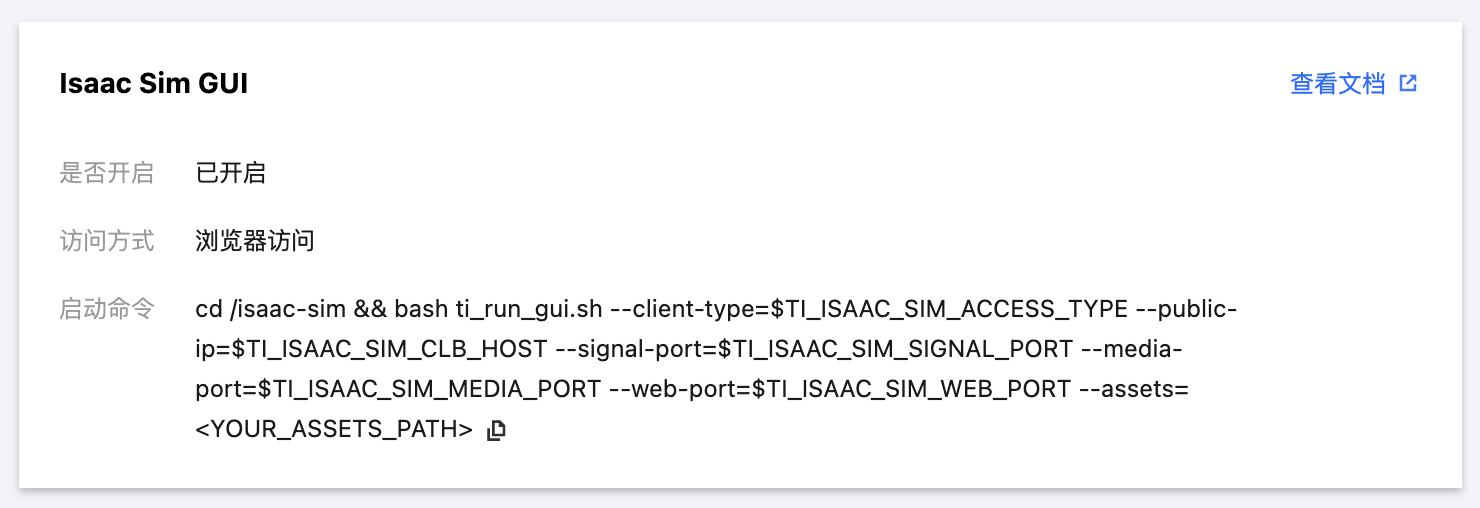
步骤2:启动 Isaac Sim 服务端
1. 登录开发机或者点击任务式建模详情页,进入实例列表,登入容器。执行上述命令:
浏览器访问:
cd /isaac-sim && bash ti_run_gui.sh --client-type=$TI_ISAAC_SIM_ACCESS_TYPE --public-ip=$TI_ISAAC_SIM_CLB_HOST --signal-port=$TI_ISAAC_SIM_SIGNAL_PORT --media-port=$TI_ISAAC_SIM_MEDIA_PORT --web-port=$TI_ISAAC_SIM_WEB_PORT --assets=<YOUR_ASSETS_PATH>
串流访问:
cd /isaac-sim && bash ti_run_gui.sh --client-type=$TI_ISAAC_SIM_ACCESS_TYPE --public-ip=$TI_ISAAC_SIM_CLB_HOST --signal-port=$TI_ISAAC_SIM_SIGNAL_PORT --media-port=$TI_ISAAC_SIM_MEDIA_PORT --assets=<YOUR_ASSETS_PATH>
“--assets=” 后面的内容改为您自己挂载进来的路径,这个路径下应该是准备 Assets 中最终目录结构的红框部分。
2. 等待 Isaac Sim 启动完成。首次启动可能需要 3-5 分钟,请耐心等待。
浏览器访问:

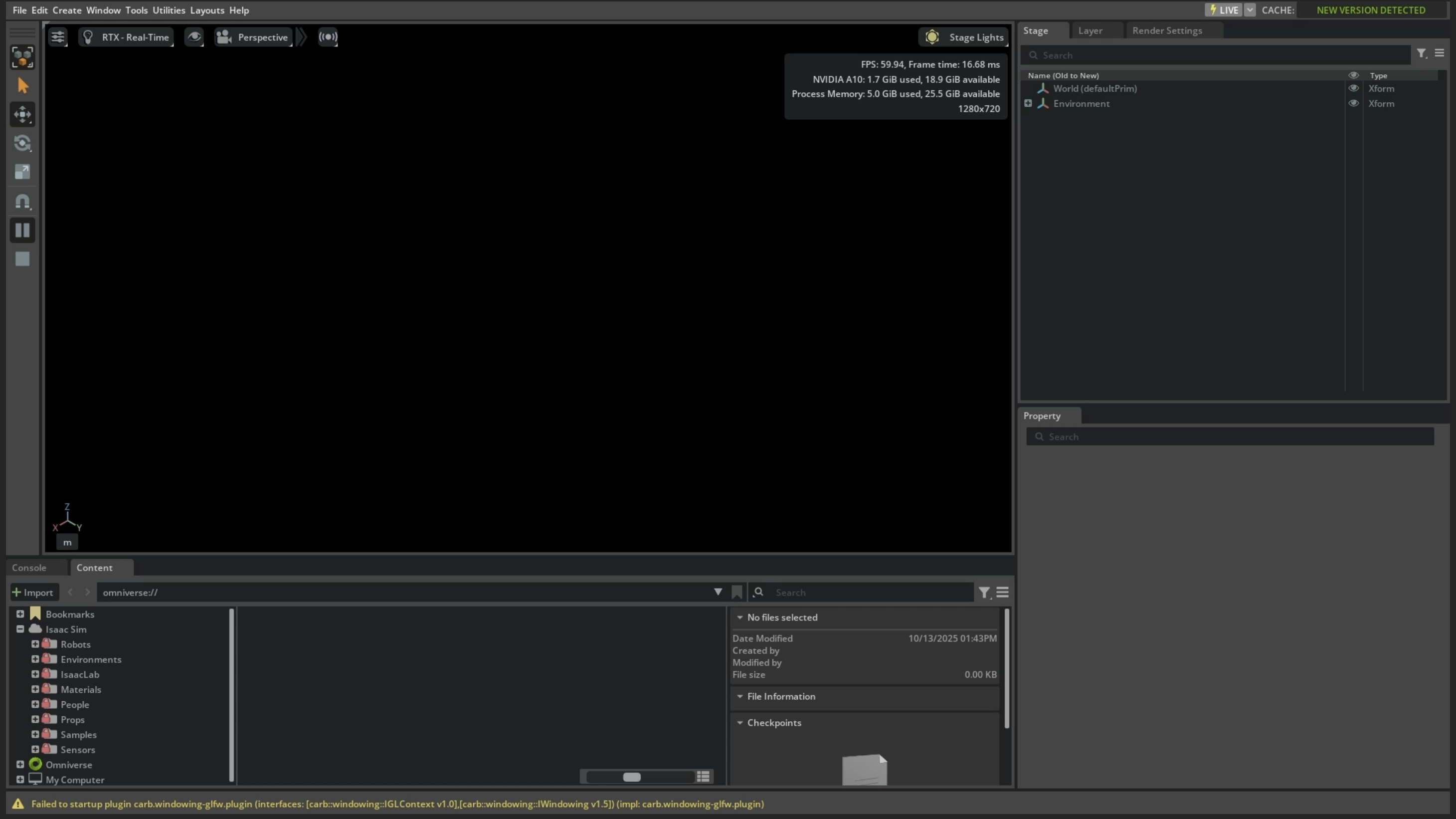
串流访问:

步骤3:打开仿真页面
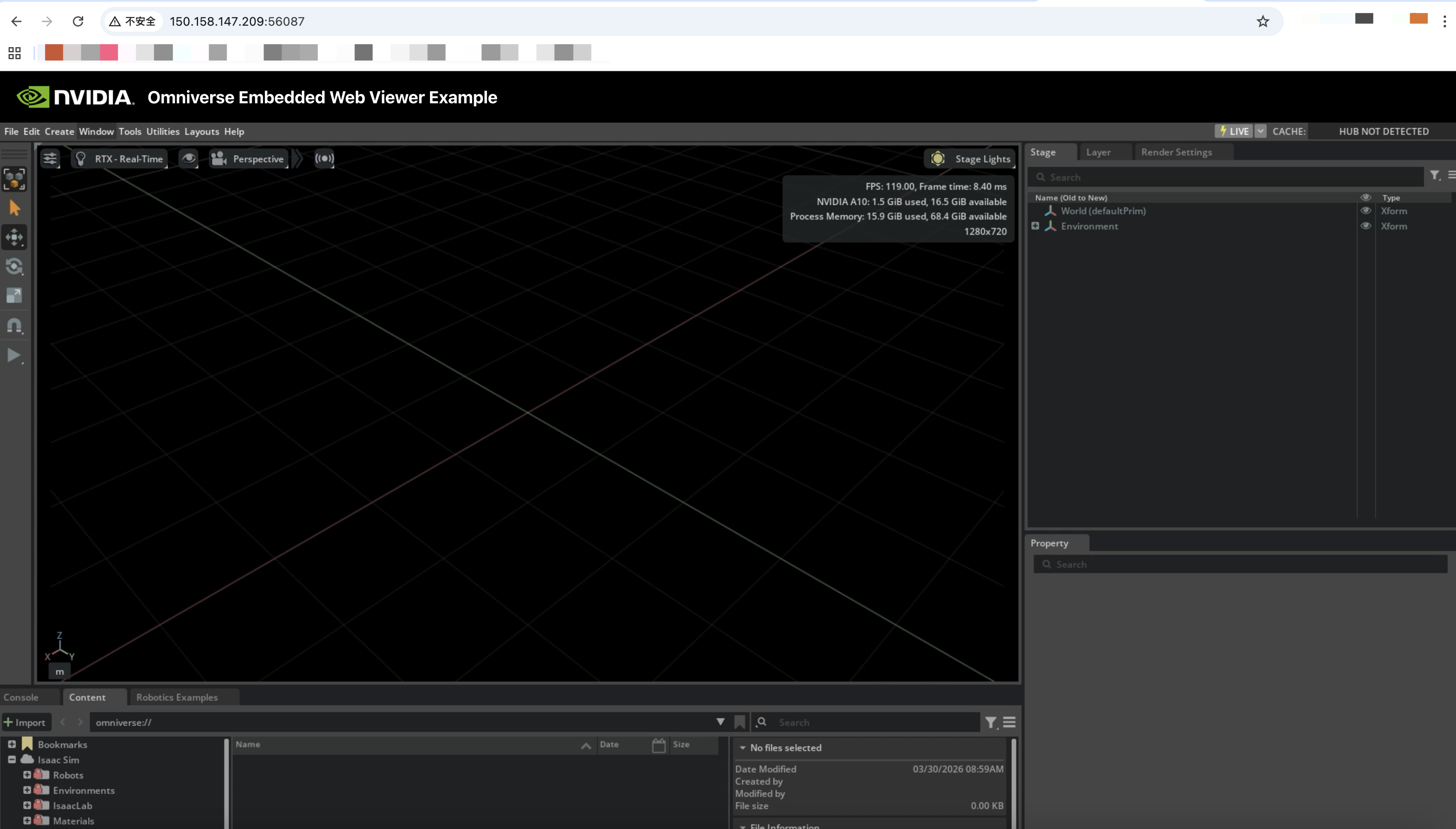
若使用浏览器访问,此时您可以将 isaac-sim-web 服务的 CLB 访问地址输入浏览器,即可查看直播。
若使用串流访问,您需要提前安装 Isaac Sim WebRTC Streaming Client,详见前文。安装完成后单击图标打开客户端,填入上一步准备的 CLB 的公网 IP。
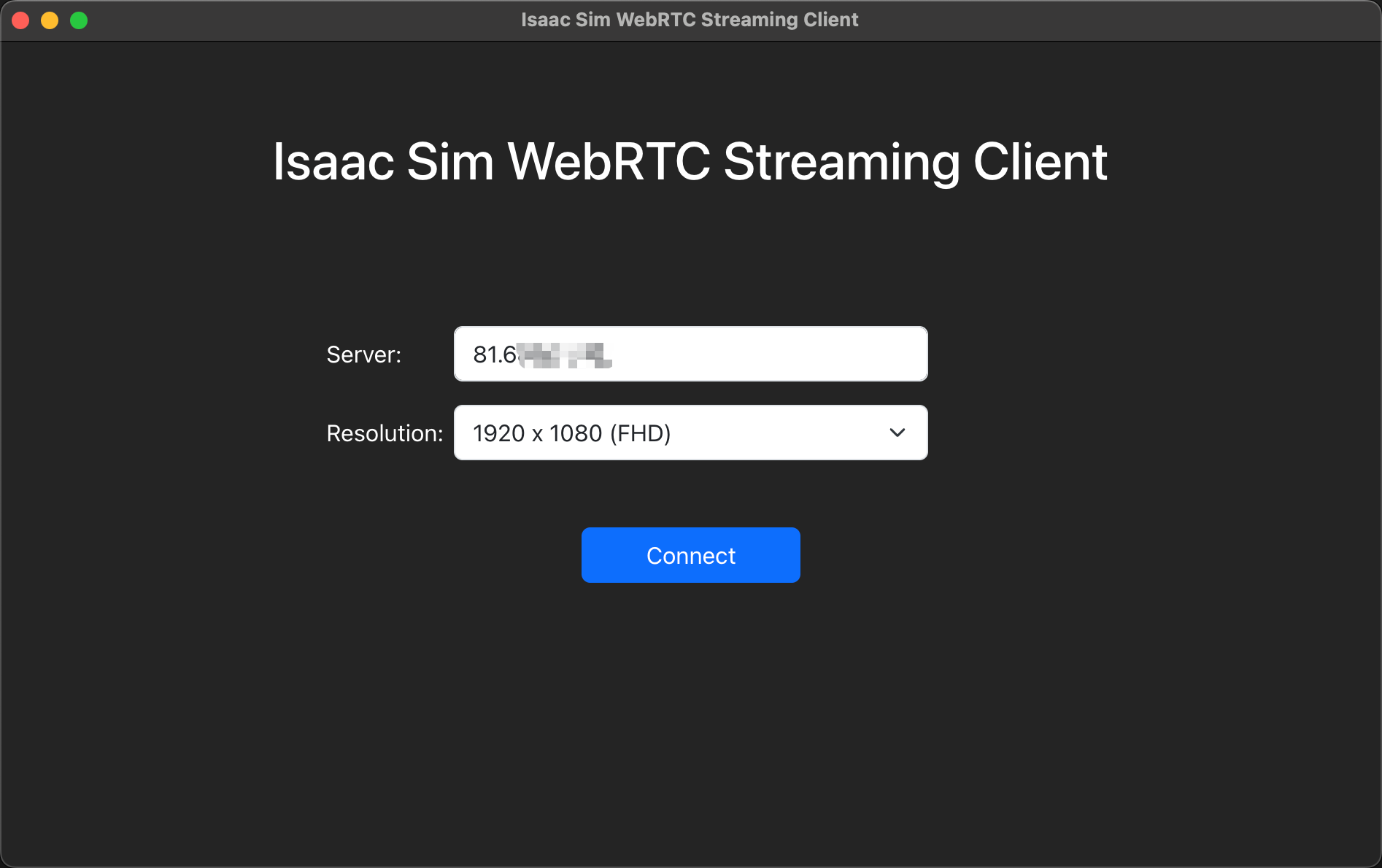
单击 Connect,即可打开 Isaac Sim GUI。
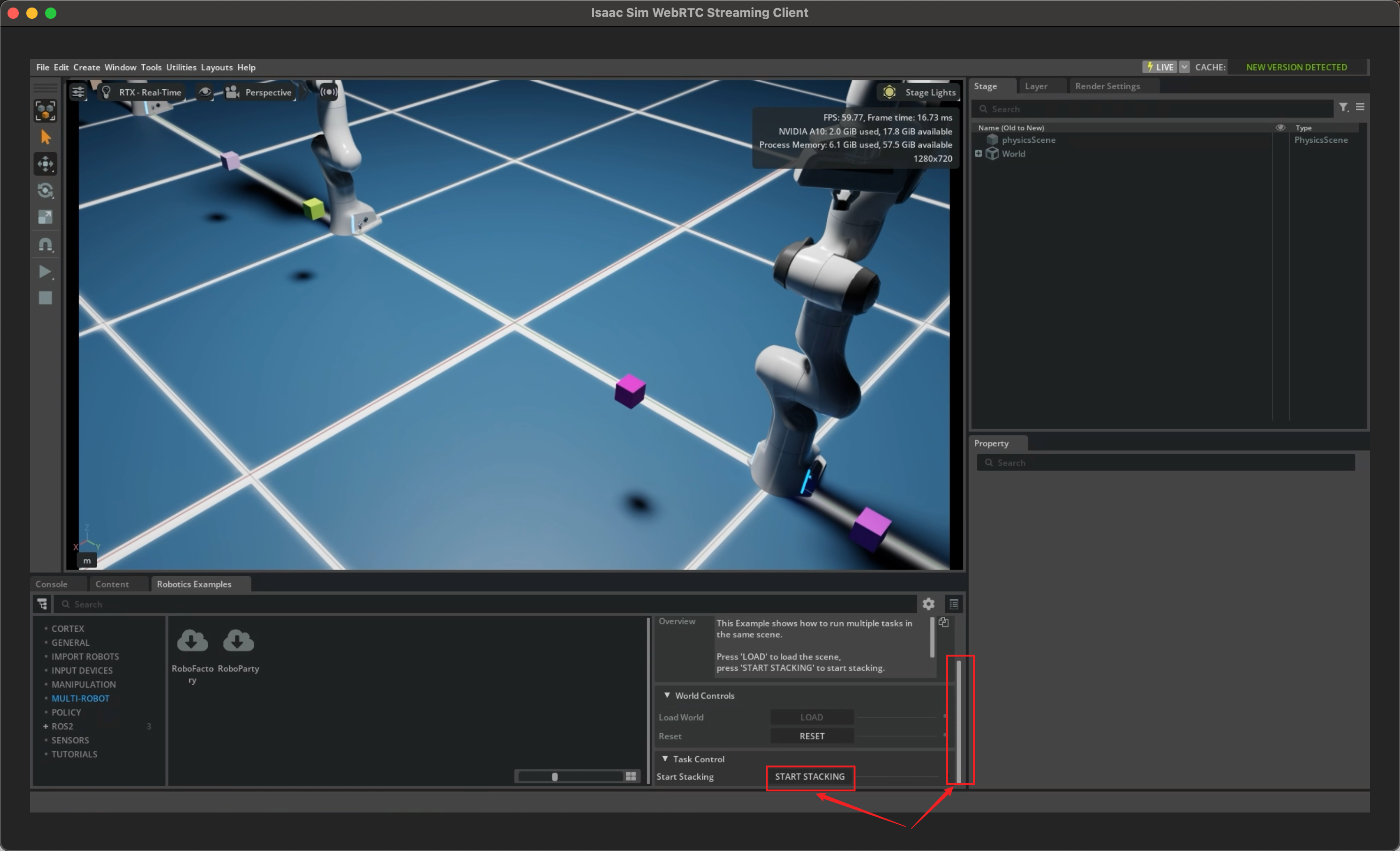
步骤4:仿真演示
1. 单击 Window > Examples > Robotics Examples,左下角出现 Robotics Examples 面板。
2. 选中 MULTI ROBOT > RoboFactory。
3. 单击右方的 LOAD。

4. 加载完成后,下拉滚动条、点击 START STACKING,即可看到机器人开始执行叠箱子的动作。
参考文档
1. Download Isaac Sim
2. Livestream Clients
3. Setup Tips



