【Android RTMP】NV21 图像旋转处理 ( 图像旋转算法 | 后置摄像头顺时针旋转 90 度 | 前置摄像头顺时针旋转 90 度 )
【Android RTMP】NV21 图像旋转处理 ( 图像旋转算法 | 后置摄像头顺时针旋转 90 度 | 前置摄像头顺时针旋转 90 度 )

文章目录
一、 后置摄像头顺时针旋转 90 度
1 . NV21 格式图像数据的排列 :
个 Y 灰度数据在前 , 然后
组 (
个 ) VU 色彩值 , 饱和度 , 数据交替存放 ;
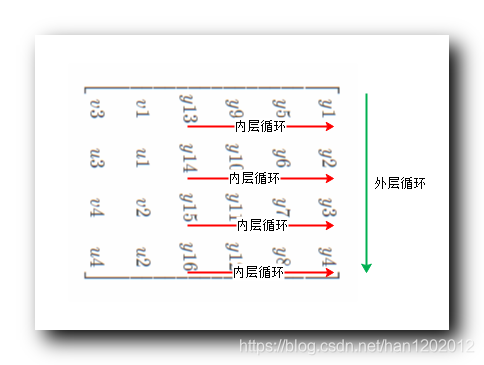
2 . NV21 格式的图像的 YUV 值顺时针旋转 90 度后的 YUV 矩阵为 :
3 . 灰度值 Y 数据读取顺序 :
① 外层循环 : 逐行遍历, 从第一行遍历到最后一行, 从 0 到 mWidth - 1 ;
② 内存循环 : 遍历每一行时, 从底部遍历到顶部, 从 mHeight - 1 到 0 ;
for (int i = 0; i < mWidth; i++) {
// 第 i 行, 从每一列的最后一个像素 ( 索引 mHeight - 1 ) 遍历到第一个像素 ( 索引 0 )
for (int j = mHeight - 1; j >= 0; j--) {
// 将读取到的 Y 灰度值存储到 mNv21DataBuffer 缓冲区中
mNv21DataBuffer[positionIndex++] = data[mWidth * j + i];
}
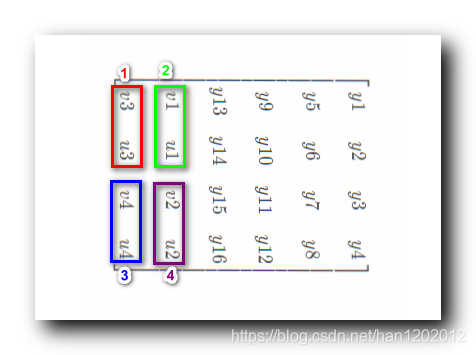
}4 . 饱和度 色彩值 UV 数据读取顺序 :
① 数据高度个数 : Y 数据的高度与图像高度相等 , UV 数据高度相当于 Y 数据高度的一半 ;
② UV 数据排列 : V 色彩值在前, U 饱和度在后, UV 数据交替排列 , 一行 mWidth 中, 排布了 mWidth / 2 组 UV 数据 ;
③ UV 数据组有 mWidth / 2 行, mHeight / 2 列, 因此遍历时, 有如下规则 :
- 按照行遍历 : 遍历 mWidth / 2 次
- 按照列遍历 : 遍历 mHeight / 2 次
④ 外层遍历 : 每隔 2 行, 遍历一次, 遍历 mWidth / 2 次 ; 遍历行从 0 到 mWidth / 2 - 1 ;
⑤ 内层遍历 : UV 数据也需要倒着读 , 从 mHeight / 2 - 1 遍历到 0 ;
for (int i = 0; i < mWidth / 2; i ++) {
for (int j = UVByteHeight - 1; j >= 0; j--) {
// 读取数据时, 要从 YByteCount 之后的数据开始遍历
// 使用 mWidth 和 UVByteHeight 定位要遍历的位置
// 拷贝 V 色彩值数据
mNv21DataBuffer[positionIndex++] = data[YByteCount + mWidth / 2 * 2 * j + i];
// 拷贝 U 饱和度数据
mNv21DataBuffer[positionIndex++] = data[YByteCount + mWidth / 2 * 2 * j + i + 1];
}
}二、 前置摄像头顺时针旋转 90 度
1 . NV21 格式图像数据的排列 :
个 Y 灰度数据在前 , 然后
组 (
个 ) VU 色彩值 , 饱和度 , 数据交替存放 ;
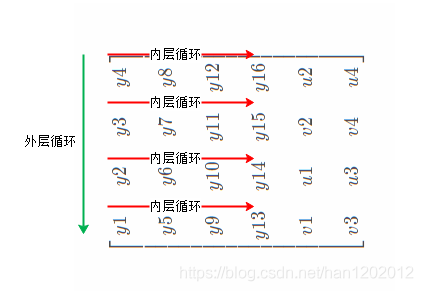
2 . NV21 格式的图像的 YUV 值逆时针旋转 90 度后的 YUV 矩阵为 :
3 . 灰度值 Y 数据读取顺序 :
① 外层循环 : 逐行遍历, 从最后一行遍历到第一行, 从 mWidth - 1 到 0 ;
② 内存循环 : 遍历第 i 行时, 从顶部遍历到底部, 从 0 到 mHeight - 1
for (int i = mWidth - 1; i >= 0; i--) {
// 第 i 行, 从每一列的最后一个像素 ( 索引 mHeight - 1 ) 遍历到第一个像素 ( 索引 0 )
for (int j = 0; j < mHeight; j++) {
// 将读取到的 Y 灰度值存储到 mNv21DataBuffer 缓冲区中
mNv21DataBuffer[positionIndex++] = data[mWidth * j + i];
}
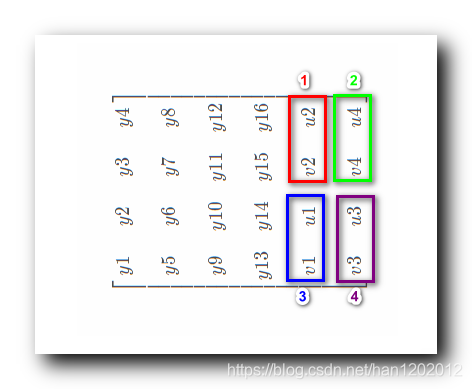
}4 . 饱和度 色彩值 UV 数据读取顺序 :
① 数据高度个数 : Y 数据的高度与图像高度相等 , UV 数据高度相当于 Y 数据高度的一半 ;
② UV 数据排列 : V 色彩值在前, U 饱和度在后, UV 数据交替排列 , 一行 mWidth 中, 排布了 mWidth / 2 组 UV 数据 ;
③ UV 数据组有 mWidth / 2 行, mHeight / 2 列, 因此遍历时, 有如下规则 :
- 按照行遍历 : 遍历 mWidth / 2 次
- 按照列遍历 : 遍历 mHeight / 2 次
④ 外层遍历 : 每隔 2 行, 遍历一次, 遍历 mWidth / 2 次 ; 遍历行从mWidth / 2 - 1 到 0 ;
⑤ 内层遍历 : UV 数据也需要倒着读 , 从 0 遍历到 mHeight / 2 - 1 ;
for (int i = mWidth / 2 - 1; i >= 0 ; i --) {
for (int j = 0; j < UVByteHeight; j++) {
// 读取数据时, 要从 YByteCount 之后的数据开始遍历
// 使用 mWidth 和 UVByteHeight 定位要遍历的位置
// 拷贝 V 色彩值数据
mNv21DataBuffer[positionIndex++] = data[YByteCount + mWidth / 2 * 2 * j + i];
// 拷贝 U 饱和度数据
mNv21DataBuffer[positionIndex++] = data[YByteCount + mWidth / 2 * 2 * j + i + 1];
}
}三、 NV21 格式图像旋转代码
/**
* 将 NV21 格式的图片数据顺时针旋转 90 度
* 后置摄像头顺时针旋转 90 度
* 前置摄像头逆时针旋转 90 度
* @param data
*/
private void nv21PictureDataClockwiseRotation90(byte[] data){
// Y 灰度数据的个数
int YByteCount = mWidth * mHeight;
// 色彩度 U, 饱和度 V 数据高度
int UVByteHeight = mHeight / 2;
// 色彩度 U, 饱和度 V 数据个数
int UVByteCount = YByteCount / 4;
// 数据处理索引值, 用于记录写入到 mNv21DataBuffer 中的元素个数
// 及下一个将要写入的元素的索引
int positionIndex = 0;
/*
后置摄像头处理
后置摄像头需要将图像顺时针旋转 90 度
*/
if(mCameraFacing == Camera.CameraInfo.CAMERA_FACING_BACK){
/*
读取 Y 灰度数据
顺时针旋转 90 度
外层循环 : 逐行遍历, 从第一行遍历到最后一行
内存循环 : 遍历每一行时, 从底部遍历到顶部
*/
for (int i = 0; i < mWidth; i++) {
// 第 i 行, 从每一列的最后一个像素 ( 索引 mHeight - 1 ) 遍历到第一个像素 ( 索引 0 )
for (int j = mHeight - 1; j >= 0; j--) {
// 将读取到的 Y 灰度值存储到 mNv21DataBuffer 缓冲区中
mNv21DataBuffer[positionIndex++] = data[mWidth * j + i];
}
}
/*
读取 UV 数据
Y 数据的高度与图像高度相等
UV 数据高度相当于 Y 数据高度的一半
UV 数据排列 : V 色彩值在前, U 饱和度在后, UV 数据交替排列
UV 数据交替排列, 一行 mWidth 中, 排布了 mWidth / 2 组 UV 数据
UV 数据组有 mWidth / 2 行, mHeight / 2 列, 因此遍历时, 有如下规则 :
按照行遍历 : 遍历 mWidth / 2 次
按照列遍历 : 遍历 mHeight / 2 次
外层遍历 : 遍历行从 0 到 mWidth / 2
外层按照行遍历时, 每隔 2 行, 遍历一次, 遍历 mWidth / 2 次
内层遍历时 : 遍历列, 从 mHeight / 2 - 1 遍历到 0
UV 数据也需要倒着读 , 从 mHeight / 2 - 1 遍历到 0
*/
for (int i = 0; i < mWidth / 2; i ++) {
for (int j = UVByteHeight - 1; j >= 0; j--) {
// 读取数据时, 要从 YByteCount 之后的数据开始遍历
// 使用 mWidth 和 UVByteHeight 定位要遍历的位置
// 拷贝 V 色彩值数据
mNv21DataBuffer[positionIndex++] = data[YByteCount + mWidth / 2 * 2 * j + i];
// 拷贝 U 饱和度数据
mNv21DataBuffer[positionIndex++] = data[YByteCount + mWidth / 2 * 2 * j + i + 1];
}
}
}else if(mCameraFacing == Camera.CameraInfo.CAMERA_FACING_FRONT){
/*
前置摄像头处理
前置摄像头与后置摄像头相反, 后置摄像头顺时针旋转 90 度
前置摄像头需要将图像逆时针旋转 90 度
*/
/*
读取 Y 灰度数据
逆时针旋转 90 度
外层循环 : 逐行遍历, 从最后一行遍历到第一行, 从 mWidth - 1 到 0
内存循环 : 遍历第 i 行时, 从顶部遍历到底部, 从 0 到 mHeight - 1
*/
for (int i = mWidth - 1; i >= 0; i--) {
// 第 i 行, 从每一列的最后一个像素 ( 索引 mHeight - 1 ) 遍历到第一个像素 ( 索引 0 )
for (int j = 0; j < mHeight; j++) {
// 将读取到的 Y 灰度值存储到 mNv21DataBuffer 缓冲区中
mNv21DataBuffer[positionIndex++] = data[mWidth * j + i];
}
}
/*
读取 UV 数据
Y 数据的高度与图像高度相等
UV 数据高度相当于 Y 数据高度的一半
UV 数据排列 : V 色彩值在前, U 饱和度在后, UV 数据交替排列
UV 数据交替排列, 一行 mWidth 中, 排布了 mWidth / 2 组 UV 数据
UV 数据组有 mWidth / 2 行, mHeight / 2 列, 因此遍历时, 有如下规则 :
按照行遍历 : 遍历 mWidth / 2 次
按照列遍历 : 遍历 mHeight / 2 次
外层遍历 : 遍历行从 mWidth / 2 - 1 到 0
外层按照行遍历时, 每隔 2 行, 遍历一次, 遍历 mWidth / 2 次
内层遍历时 : 遍历列, 从 0 遍历到 mHeight / 2 - 1
UV 数据也需要倒着读 , 从 0 遍历到 mHeight / 2 - 1
*/
for (int i = mWidth / 2 - 1; i >= 0 ; i --) {
for (int j = 0; j < UVByteHeight; j++) {
// 读取数据时, 要从 YByteCount 之后的数据开始遍历
// 使用 mWidth 和 UVByteHeight 定位要遍历的位置
// 拷贝 V 色彩值数据
mNv21DataBuffer[positionIndex++] = data[YByteCount + mWidth / 2 * 2 * j + i];
// 拷贝 U 饱和度数据
mNv21DataBuffer[positionIndex++] = data[YByteCount + mWidth / 2 * 2 * j + i + 1];
}
}
}
}腾讯云开发者
