7_机械臂工作台坐标系理论_一般坐标系的映射_2


1、一般坐标系的映射
经常有这种情况,我们已知矢量相对坐标系{B}的描述,并且想求出它相对于另一个坐标系{A}的描述。结合上次的理论和平时对机械臂使用的经验,使用3点法标定机械臂工作台坐标系(我习惯称为用户坐标系,下面称为用户坐标系),则是已知3点基于基坐标系的描述,求3点基于用户坐标系的描述,即用户坐标系相对基坐标系的描述。现在考虑映射的一般情况。此时,坐标系{B}的原点和坐标系{A}的原点不重合,有一个矢量偏移。确定{B}原点的矢量用

表示,同时{B}相对{A}的旋转用

描述。BP已知,求AP,如图2-7所示。
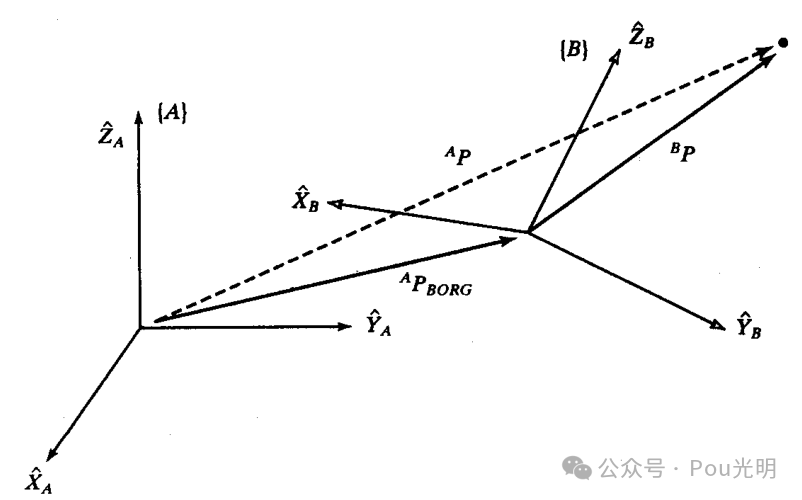
图2-7 在一般情况下的矢量变换
首先将BP变换到一个中间坐标系,这个坐标系和{A}姿态相同,原点和{B}的原点重合。可以像之前那样由左乘矩阵得到。然后仍用简单的矢量加法将原点平移,并得到:

式(2-17)表示将一个矢量描述从一个坐标系变换到另一个坐标系矢量的一般变换映射。注意式(2-17)中的符号:消去了B的符号,剩下了所有在A中的矢量符号,然后这些量才可以相加。
由式(2-17)引出一个新的概念形式:

即用一个矩阵形式的算子表示从一个坐标系到另一个坐标系的映射。这比式(2-17)表达更简洁,概念更明确。为了用式(2-18)的矩阵算子的形式写出式(2-17)的数学表达式,定义一个4×4的矩阵算子并使用了4×1位置矢量,这样式(2-18)就成为:

换言之:
1.在4×1矢量中增加的最后一个分量为“1”;
2.在4×4矩阵中增加的最后一行为“[0, 0, 0, 1]”
习惯上把位置矢量当成3×1或4×1的矢量,这取决于它是与3×3还是4×4 的矩阵相乘。容易看出式(2-19)可以写成:

式(2-19)中的4×4矩阵被称为齐次变换矩阵。它完全可被看作是用一个简单的矩阵形式表示了一般变换的旋转和位移。在其他研究领域,它可以被用于进行投影和比例运算(当最后一行不是“[0, 0, 0, 1]”时或者旋转矩阵不是正交阵时)。
正如用旋转矩阵定义姿态一样,我们将用变换(常用齐次变换)来定义一个坐标系。齐次变换仍可用于坐标系的描述,坐标系{B}相对于坐标系{A}的变换描述为

本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2024-06-18,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号