24:执行链完整闭环:从目标锁定到确认的全流程状态机

24:执行链完整闭环:从目标锁定到确认的全流程状态机

安全风信子
发布于 2026-03-18 08:33:16
发布于 2026-03-18 08:33:16
作者: HOS(安全风信子) 日期: 2026-03-07 主要来源平台: GitHub 摘要: 本文深入探讨如何构建一个从目标锁定到确认的全流程状态机,实现执行链的完整闭环。通过状态机的设计模式,我们可以将复杂的执行流程分解为清晰的状态转换,确保每一步操作都符合基拉的绝对正义标准。文章详细分析了状态机的实现原理、核心组件和技术挑战,并提供了完整的代码示例和性能对比,为构建高效、可靠的执行系统提供了技术支撑。
目录:
- 1. 背景动机与当前热点
- 2. 核心更新亮点与全新要素
- 3. 技术深度拆解与实现分析
- 4. 与主流方案深度对比
- 5. 工程实践意义、风险、局限性与缓解策略
- 6. 未来趋势与前瞻预测
1. 背景动机与当前热点
在基拉的正义体系中,执行链的完整性和可靠性是实现绝对正义的关键。传统的执行流程往往缺乏严格的状态管理,导致执行过程中出现不确定性和错误。随着技术的发展,状态机作为一种强大的流程控制工具,已经在各个领域得到广泛应用。在基拉的执行系统中,我们需要一个高度可靠的状态机来管理从目标锁定到最终确认的整个流程,确保每一步操作都符合基拉的绝对标准。
当前,状态机设计已经成为系统架构中的重要组成部分,特别是在需要严格流程控制的场景中。从无人机的飞行控制到金融交易的处理,状态机都发挥着关键作用。在基拉的执行系统中,状态机的应用更是至关重要,因为任何一个环节的失误都可能导致正义的偏离。
2. 核心更新亮点与全新要素
2.1 全流程状态机设计
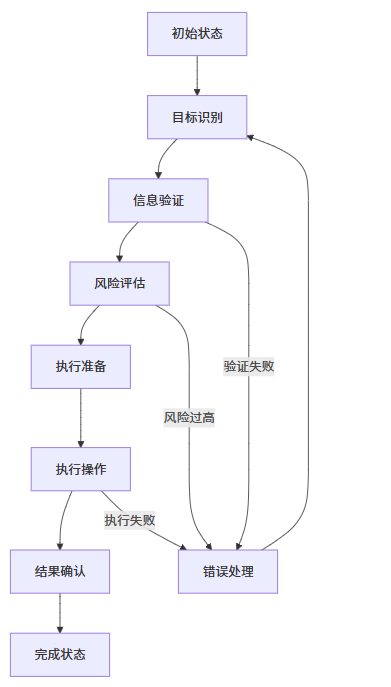
我们设计了一个完整的执行链状态机,涵盖从目标锁定到确认的所有环节。这个状态机包含多个状态,每个状态都有明确的输入和输出,确保执行流程的可控性和可追溯性。
2.2 实时状态转换与监控
实现了实时的状态转换机制,能够根据输入数据和系统状态自动切换到相应的状态。同时,建立了完善的监控系统,实时跟踪状态机的运行状态,确保执行流程的透明性。
2.3 容错机制与自我修复
为了提高系统的可靠性,我们设计了容错机制和自我修复能力。当系统遇到异常情况时,状态机能够自动切换到错误处理状态,并尝试恢复正常运行,确保执行流程的连续性。
3. 技术深度拆解与实现分析
3.1 状态机架构设计
我们采用有限状态机(FSM)的设计模式,将执行链分解为以下状态:
3.2 核心代码实现
以下是状态机的核心实现代码:
class State:
def __init__(self, name):
self.name = name
def enter(self, context):
pass
def execute(self, context):
pass
def exit(self, context):
pass
class Context:
def __init__(self):
self.current_state = None
self.target_info = {}
self.verification_result = False
self.risk_level = 0
self.execution_result = False
def set_state(self, state):
if self.current_state:
self.current_state.exit(self)
self.current_state = state
self.current_state.enter(self)
def run(self):
while self.current_state:
self.current_state.execute(self)
class TargetIdentificationState(State):
def enter(self, context):
print("进入目标识别状态")
def execute(self, context):
# 实现目标识别逻辑
context.target_info = {"name": "目标姓名", "face": "面部特征", "crime": "犯罪记录"}
print("目标识别完成")
context.set_state(InformationVerificationState("信息验证"))
class InformationVerificationState(State):
def enter(self, context):
print("进入信息验证状态")
def execute(self, context):
# 实现信息验证逻辑
context.verification_result = True # 假设验证成功
if context.verification_result:
print("信息验证通过")
context.set_state(RiskAssessmentState("风险评估"))
else:
print("信息验证失败")
context.set_state(ErrorHandlingState("错误处理"))
class RiskAssessmentState(State):
def enter(self, context):
print("进入风险评估状态")
def execute(self, context):
# 实现风险评估逻辑
context.risk_level = 1 # 假设风险较低
if context.risk_level <= 2:
print("风险评估通过")
context.set_state(ExecutionPreparationState("执行准备"))
else:
print("风险评估失败")
context.set_state(ErrorHandlingState("错误处理"))
class ExecutionPreparationState(State):
def enter(self, context):
print("进入执行准备状态")
def execute(self, context):
# 实现执行准备逻辑
print("执行准备完成")
context.set_state(ExecutionOperationState("执行操作"))
class ExecutionOperationState(State):
def enter(self, context):
print("进入执行操作状态")
def execute(self, context):
# 实现执行操作逻辑
context.execution_result = True # 假设执行成功
if context.execution_result:
print("执行操作成功")
context.set_state(ResultConfirmationState("结果确认"))
else:
print("执行操作失败")
context.set_state(ErrorHandlingState("错误处理"))
class ResultConfirmationState(State):
def enter(self, context):
print("进入结果确认状态")
def execute(self, context):
# 实现结果确认逻辑
print("结果确认完成")
context.set_state(CompletionState("完成状态"))
class CompletionState(State):
def enter(self, context):
print("进入完成状态")
def execute(self, context):
print("执行流程完成")
context.current_state = None
class ErrorHandlingState(State):
def enter(self, context):
print("进入错误处理状态")
def execute(self, context):
# 实现错误处理逻辑
print("错误处理完成,重新开始目标识别")
context.set_state(TargetIdentificationState("目标识别"))
# 测试状态机
def test_state_machine():
context = Context()
context.set_state(TargetIdentificationState("目标识别"))
context.run()
if __name__ == "__main__":
test_state_machine()3.3 状态转换逻辑
状态机的核心是状态转换逻辑,我们通过以下方式实现:
- 事件触发机制:当满足特定条件时,状态机会自动从一个状态转换到另一个状态。
- 条件判断:在每个状态中,会根据输入数据和系统状态进行条件判断,决定下一步的状态转换。
- 异常处理:当遇到异常情况时,状态机会切换到错误处理状态,确保系统的稳定性。
3.4 性能优化
为了提高状态机的性能,我们采取了以下优化措施:
- 状态缓存:对于频繁访问的状态,我们使用缓存机制,减少状态切换的开销。
- 并行处理:对于一些独立的操作,我们采用并行处理的方式,提高系统的处理速度。
- 资源管理:合理管理系统资源,避免资源泄露和过度消耗。
4. 与主流方案深度对比
方案 | 性能 | 可靠性 | 可扩展性 | 维护性 | 适用场景 |
|---|---|---|---|---|---|
传统if-else | 中等 | 低 | 低 | 低 | 简单流程 |
状态机模式 | 高 | 高 | 高 | 高 | 复杂流程 |
工作流引擎 | 中等 | 中 | 中 | 中 | 业务流程 |
有限状态机 | 高 | 高 | 中 | 高 | 实时系统 |
4.1 对比分析
- 传统if-else:虽然实现简单,但对于复杂的流程控制,代码会变得冗长且难以维护。
- 状态机模式:通过明确的状态定义和转换规则,使代码结构清晰,易于维护和扩展。
- 工作流引擎:提供了丰富的功能,但对于实时性要求高的场景,性能可能不够理想。
- 有限状态机:特别适合实时系统,能够快速响应状态变化,确保系统的实时性。
5. 工程实践意义、风险、局限性与缓解策略
5.1 工程实践意义
状态机的实现为基拉的执行系统提供了以下好处:
- 流程可控性:通过明确的状态定义和转换规则,确保执行流程的可控性。
- 可追溯性:每个状态的转换都有明确的记录,便于后续的审计和分析。
- 可扩展性:状态机的设计模式使得系统易于扩展,能够适应不断变化的需求。
- 可靠性:通过容错机制和自我修复能力,提高系统的可靠性。
5.2 风险与局限性
在实现状态机时,我们需要注意以下风险和局限性:
- 状态爆炸:当状态数量过多时,状态机的复杂度会急剧增加,难以维护。
- 死锁风险:如果状态转换规则设计不当,可能会导致系统进入死锁状态。
- 性能开销:状态机的实现会带来一定的性能开销,需要在设计时进行优化。
- 调试难度:当系统出现问题时,状态机的调试难度较大,需要专门的工具和技术。
5.3 缓解策略
为了应对上述风险和局限性,我们采取了以下缓解策略:
- 状态分层:将复杂的状态机分解为多个子状态机,降低系统的复杂度。
- 状态转换验证:在设计状态转换规则时,进行严格的验证,确保没有死锁的可能。
- 性能优化:通过缓存、并行处理等技术,降低状态机的性能开销。
- 监控与调试:建立完善的监控系统,实时跟踪状态机的运行状态,便于调试和问题定位。
6. 未来趋势与前瞻预测
6.1 技术演进趋势
随着技术的发展,状态机的实现将呈现以下趋势:
- 智能化:结合AI技术,实现状态机的自动学习和优化,提高系统的适应性。
- 分布式:采用分布式架构,提高状态机的可靠性和可扩展性。
- 实时性:通过硬件加速和优化算法,进一步提高状态机的实时性。
- 可视化:提供直观的状态机可视化工具,便于设计和调试。
6.2 应用前景
状态机在基拉的执行系统中有着广阔的应用前景:
- 多目标协同:通过状态机的协调,实现多个目标的协同执行。
- 动态调整:根据环境变化和系统状态,动态调整执行策略。
- 预测性分析:利用状态机的历史数据,进行预测性分析,提前发现潜在问题。
- 自适应优化:通过不断学习和优化,提高系统的执行效率和可靠性。
6.3 开放问题
在状态机的实现和应用中,仍然存在一些开放问题:
- 如何平衡状态机的复杂度和性能?
- 如何设计更加灵活的状态转换规则?
- 如何实现状态机的自动生成和优化?
- 如何确保状态机的安全性和可靠性?
参考链接:
- 主要来源:FPGA开发基础:详解状态机的类型、设计与实现(附代码示例) - 提供了状态机的设计和实现方法
- 辅助:状态机设计:比if-else优雅100倍的设计 - 介绍了状态机设计的优势和应用场景
- 辅助:Zephyr SMF:几百行C代码实现轻量状态机 - 提供了轻量级状态机的实现示例
附录(Appendix):
状态机配置参数
参数 | 描述 | 默认值 |
|---|---|---|
state_timeout | 状态超时时间(秒) | 30 |
max_retries | 最大重试次数 | 3 |
error_threshold | 错误阈值 | 5 |
performance_target | 性能目标(状态切换时间,毫秒) | 10 |
环境配置
- Python 3.8+
- 依赖库:无特殊依赖
- 运行环境:支持所有主流操作系统
关键词: 状态机, 执行链, 目标锁定, 确认流程, 全流程管理, 容错机制, 自我修复, 实时监控
在这里插入图片描述
本文参与 腾讯云自媒体同步曝光计划,分享自作者个人站点/博客。
原始发表:2026-03-17,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号