自主LLM智能体构建:从基础到高效实践

自主LLM智能体构建:从基础到高效实践

用户2771172
发布于 2026-05-18 19:51:19
发布于 2026-05-18 19:51:19
当单个LLM还在简单问答时,自主智能体已能像人类一样拆解复杂任务、反思错误并持续进化。这项研究系统拆解了构建这类智能体的四大核心系统:让AI拥有感知环境的"眼睛"、规划决策的"大脑"、存储经验的"记忆"和执行动作的"双手"。该论文不仅揭示了实现真正自主智能的架构密码,更为解决GUI操作困难、应对突发干扰等现实难题指明了突破方向。
引言:从工具到伙伴的AI革命
传统AI工具在复杂任务中的失败率达到57.1%,而人类完成率超过72.36%。这一差距源于现有系统仍停留在被动工具层面,难以应对真实场景中的复杂需求。例如,面对十万行规模的代码库时,GPT-4仅能提供局部建议,无法识别代码间的隐式依赖,在GUI操作与业务流程管理等任务中表现尤为局限。
LLM智能体的出现正推动AI从工具向伙伴演进。这类系统具备自主推理能力,能够主动规划任务并参与复杂决策,而非仅被动响应用户指令。作者指出,这一转变类似于“与新物种合作”,其核心在于构建能够思考的系统架构,重新定义人机协作的边界。
为什么传统AI系统不够用
传统AI系统在图形用户界面操作中面临显著挑战,其运行机制主要依赖预定义规则与固定脚本,难以适应界面元素的动态变化。一旦遭遇未见过的新控件或布局调整,系统因缺乏泛化能力而频繁失效,导致自动化流程中断。在重复性任务处理中,基于模板匹配的方法对视觉细节或位置偏移极为敏感,任何像素级差异都可能造成任务失败,反映出刚性架构对环境干扰的低容忍度。
面对执行过程中的意外干扰,例如弹窗警告或网络延迟,传统系统因缺乏环境感知与动态调整能力,往往无法做出有效响应。同时,其单模态处理特性限制了输入类型的多样性,系统无法像人类一样融合视觉、语义与上下文信息,导致在多步骤复杂任务中表现不佳。此外,这类系统普遍存在高学习成本与低迁移性问题,每个新任务均需定制化建模,任务特异性设计严重制约系统扩展,并推高长期维护成本。
四大核心系统架构揭秘
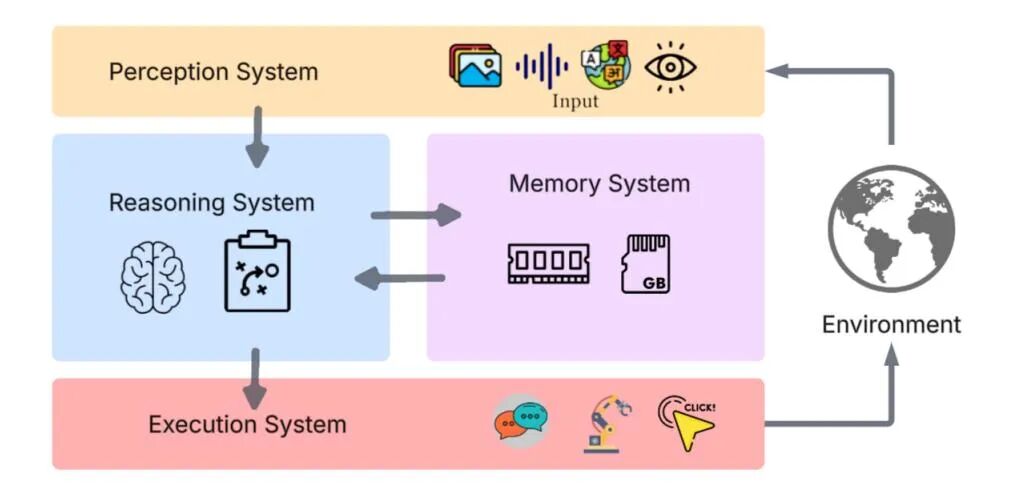
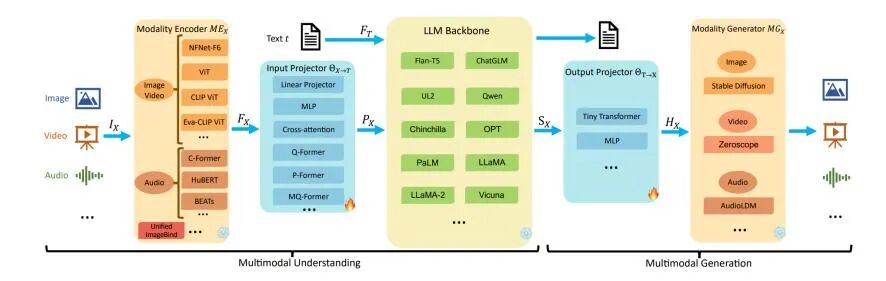
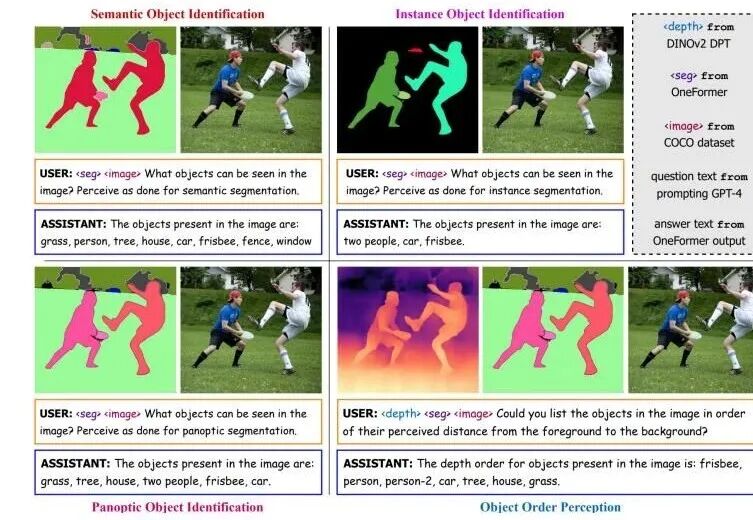
大型语言模型智能体的高效运作依赖于四大核心子系统的协同。感知系统作为智能体的感官界面,将环境信息转化为可理解数据,通过视觉编码器和结构化数据(如可访问性树)支持多模态输入,有效克服纯文本的局限性。
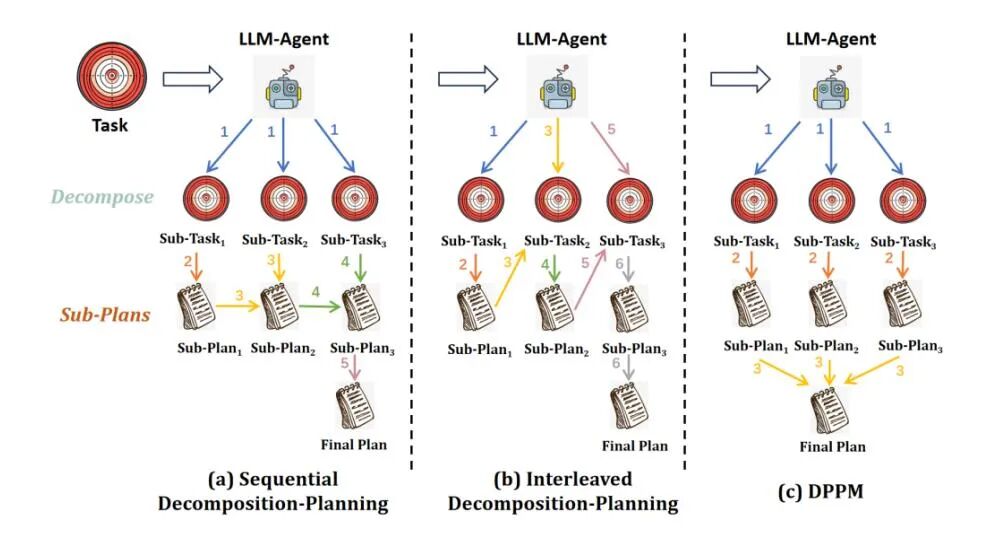
推理系统承担决策中枢的角色,其核心创新在于任务分解与多计划生成。该论文提出的DPPM框架通过并行规划子任务避免级联错误,并借助思维树和反思机制持续评估与优化行动方案,显著增强复杂问题解决能力。
记忆系统赋予智能体持续学习的能力,通过长短期记忆的协作实现知识保留。关键技术包括结合外部知识库与模型参数的检索增强生成,以及能够从成功经验中归纳可复用程序的Agent Workflow Memory。

行动系统负责将决策转化为具体操作,其创新体现在多模态行动空间的设计上。智能体不仅能通过工具调用API执行标准操作,还可生成代码以控制图形界面甚至物理设备,实现从认知到执行的完整闭环。
多智能体协作的实际威力
该论文构建的多专家智能体协作系统显著提升了任务执行的性能上限与系统鲁棒性。在这一架构中,不同专长的智能体各司其职:规划专家制定全局策略,反思专家则对执行过程进行审视与修正,从而有效突破单一模型的能力瓶颈。
面对复杂任务,系统展现出强大的动态调整能力。当子任务失败或环境变化时,智能体通过内部协作触发错误恢复机制,而非陷入预设流程的僵局。多个智能体提供的多样性视角也显著降低了因单点决策失效导致的整体崩溃风险。
实验数据显示,该系统在应对不确定性和突发异常时表现尤为突出。其性能提升不仅反映在任务成功率的显著增长,更体现在受到干扰时仍能维持稳定的输出质量。这种基于协作实现的性能增益与容错能力,是传统单一智能体架构难以达到的。
如何构建你的第一个智能体
该论文系统阐述了构建LLM智能体的关键技术路径。任务分解作为处理复杂任务的核心策略,采用分而治之原则将宏观目标拆解为可执行单元。其中分解优先与交错分解两种范式分别对应不同场景,而DPPM方法通过并行规划子任务再合并的机制,显著降低了级联错误风险。
在规划层面,研究指出单一计划存在固有局限性。自洽链式思维与思维树通过生成多样化候选方案,结合搜索算法实现最优解选择。反思机制使智能体具备动态优化能力,既能从执行结果中分析错误,又能通过魔鬼代言人式预期性反思提升规划鲁棒性。
针对持续学习需求,长期记忆管理采用检索增强生成和SQL数据库实现知识的高效存储与精确调用。工具集成则通过结构化调用外部API与代码执行工具,突破模型固有边界,使其具备处理实时数据和执行复杂运算的能力。这些技术要素共同构成了功能完备的智能体工程体系。
结语:AI智能体的未来图景
该研究指出,模块化架构与专业化组件是构建具备类人认知智能体的核心路径。当前智能体在环境交互经验和真实世界动作生成方面仍存在明显局限,视觉感知鲁棒性也需进一步提升。未来,若能在单次演示学习与持续自我纠正两个关键方向取得突破,将显著降低训练成本并增强智能体的自主能力。一旦AI实现从“学一遍”到“一直会” 的能力跃迁,人机协作模式将迎来根本性变革。作者提出,人类可能不再仅仅是智能体的导师,而更可能成为其深度合作的伙伴。
论文地址:https://arxiv.org/abs/2510.09244
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-11-03,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号