【算法基础篇】(三十七)图论基础之多源最短路:Floyd 算法吃透所有点对最短路径!

【算法基础篇】(三十七)图论基础之多源最短路:Floyd 算法吃透所有点对最短路径!
_OP_CHEN
发布于 2026-01-14 12:12:46
发布于 2026-01-14 12:12:46

前言
在图论的应用场景中,我们常常会遇到这样的需求:地图应用中查询任意两个城市间的最短车程、网络拓扑中计算任意两台设备间的最优传输路径、物流规划中确定任意两个仓库间的最低运输成本…… 这些问题的核心,都是多源最短路—— 即求出图中每一对顶点之间的最短路径。 单源最短路解决的是 “从一个起点到所有其他点” 的路径问题,而多源最短路则需要覆盖 “所有点到所有点” 的全量路径。今天这篇文章,我会聚焦多源最短路的经典解法 ——Floyd-Warshall 算法(简称 Floyd 算法),从原理剖析、代码实现到实战例题,带你彻底掌握这一 “通吃所有点对” 的强大算法。 不仅如此,我还会分享 Floyd 算法的核心拓展应用(如无向图最小环问题、动态加点的最短路径查询),结合洛谷经典例题,让你从 “理解算法” 到 “灵活运用”,真正吃透多源最短路问题!下面就让我们正式开始吧!
一、前置知识:多源最短路与 Floyd 算法的核心定位
在正式讲解算法之前,我们先明确几个关键概念,帮你建立对多源最短路的清晰认知:
1. 什么是多源最短路?
多源最短路的定义很简单:给定一个带权图(有向或无向,边权可正可负,但不能存在负环,否则部分点对的最短路径不存在),求出所有顶点对 (i, j) 之间的最短路径长度(i 到 j 的最短路径,以及 j 到 i 的最短路径,若图为有向图则可能不同)。
2. 为什么选择 Floyd 算法?
解决多源最短路,其实有两种思路:
- 思路 1:对每个顶点都跑一遍单源最短路算法(如 Dijkstra 或 SPFA)。若图中有 n 个顶点,时间复杂度为 O (n×(m log n))(堆优化 Dijkstra),适用于稀疏图。
- 思路 2:使用 Floyd 算法,时间复杂度为 O (n³),适用于稠密图(n 较小,如 n≤200)。
Floyd 算法的核心优势在于实现简单、代码简洁,仅需三层循环即可完成,无需复杂的数据结构支持。对于 n≤200 的场景,O (n³) 的时间复杂度完全可接受(200³=8e6,计算机可瞬间处理),因此成为多源最短路的首选算法。
3. 关键前提:Floyd 算法的适用条件
Floyd 算法虽然强大,但有一个重要前提:图中不能存在负环。因为如果存在负环,那么经过负环的点对之间的路径长度可以无限减小,不存在最短路径。
但要注意:Floyd 算法支持负权边(只要没有负环)。例如,图中存在边权为 - 2、-3 的边,只要没有形成回路的边权和为负,就可以正常计算。
4. 核心思想:动态规划与 “插点法”
Floyd 算法的本质是动态规划,其核心思想可以概括为 “插点法”—— 通过不断在两个顶点之间插入新的顶点,更新这两个顶点之间的最短路径。
我们用一个三维数组 f[k][i][j] 来表示动态规划的状态:
- 状态定义:
f[k][i][j]表示 “仅允许经过顶点 1~k 作为中转点时,顶点 i 到顶点 j 的最短路径长度”。
基于这个状态定义,我们可以得到状态转移方程:
- 当不使用顶点 k 作为中转点时:
f[k][i][j] = f[k-1][i][j](最短路径还是原来的路径); - 当使用顶点 k 作为中转点时:
f[k][i][j] = min(f[k-1][i][k] + f[k-1][k][j], f[k-1][i][j])(比较 “直接从 i 到 j” 和 “i 经过 k 到 j” 的路径长度,取较小值)。
空间优化:从三维到二维
观察状态转移方程可以发现,f[k][i][j] 只依赖于 f[k-1][...](上一层的状态),因此我们可以将三维数组优化为二维数组 f[i][j],直接在原数组上进行更新。
优化后的状态转移方程为:
f[i][j] = min(f[i][j], f[i][k] + f[k][j]) 这里的 k 是 “当前允许使用的中转顶点”,因此循环顺序必须是先枚举 k,再枚举 i 和 j—— 这是 Floyd 算法的关键细节,也是最容易出错的地方!
5. 算法流程总结
Floyd 算法的流程非常简洁,总共分为 3 步:
- 初始化:创建二维数组
f,f[i][j]表示顶点 i 到顶点 j 的初始距离。- 若 i == j,则
f[i][j] = 0(自己到自己的距离为 0); - 若 i 和 j 之间有直接边(权值为 w),则
f[i][j] = w; - 若 i 和 j 之间没有直接边,则
f[i][j] = INF(INF 表示无穷大,代表初始时不可达)。
- 若 i == j,则
- 插点更新:枚举所有可能的中转顶点 k(1~n),然后枚举所有顶点对 (i, j),用
f[i][k] + f[k][j]更新f[i][j]。 - 结果输出:
f[i][j]即为顶点 i 到顶点 j 的最短路径长度(若仍为 INF,则表示不可达)。
二、Floyd 算法的代码实现:简洁到极致
基于上述思路,我们可以写出 Floyd 算法的 C++ 代码。代码非常简洁,核心仅需三层循环,适合记忆和默写。
1. 基础模板代码(无向图)
#include <iostream>
#include <cstring>
using namespace std;
const int N = 110; // 顶点数上限,根据题目调整
const int INF = 0x3f3f3f3f; // 表示无穷大(注意:避免溢出)
int n, m;
int f[N][N]; // f[i][j]:i到j的最短路径长度
void floyd() {
// 枚举中转顶点k
for (int k = 1; k <= n; ++k) {
// 枚举所有顶点对(i, j)
for (int i = 1; i <= n; ++i) {
for (int j = 1; j <= n; ++j) {
// 状态转移:用k更新i到j的最短路径
f[i][j] = min(f[i][j], f[i][k] + f[k][j]);
}
}
}
}
int main() {
cin >> n >> m;
// 1. 初始化f数组
memset(f, 0x3f, sizeof f); // 所有边初始化为无穷大
for (int i = 1; i <= n; ++i) {
f[i][i] = 0; // 自己到自己的距离为0
}
// 2. 读入边的信息(无向图,双向赋值)
for (int i = 0; i < m; ++i) {
int u, v, w;
cin >> u >> v >> w;
// 若存在重边,取权值最小的边
f[u][v] = min(f[u][v], w);
f[v][u] = min(f[v][u], w);
}
// 3. 执行Floyd算法
floyd();
// 4. 输出所有点对的最短路径
for (int i = 1; i <= n; ++i) {
for (int j = 1; j <= n; ++j) {
if (f[i][j] == INF) {
cout << "INF "; // 不可达
} else {
cout << f[i][j] << " ";
}
}
cout << endl;
}
return 0;
}2. 有向图的修改
如果图是有向图,只需修改边的初始化部分 —— 仅需赋值 f[u][v] = min(f[u][v], w),无需赋值 f[v][u](因为有向边的方向是单向的)。
修改后的边初始化代码:
// 读入有向边(u→v,权值w)
for (int i = 0; i < m; ++i) {
int u, v, w;
cin >> u >> v >> w;
f[u][v] = min(f[u][v], w); // 仅单向赋值
}3. 关键细节说明
- 无穷大的选择:使用
0x3f3f3f3f作为无穷大,原因是:- 它是一个较大的数(约 1e9),不会被正常的边权值超过;
- 两个
0x3f3f3f3f相加不会溢出(0x3f3f3f3f * 2 = 0x7ffffffe,小于 int 的最大值0x7fffffff)。
- 重边处理:如果图中存在重边(多个边连接同一对顶点),我们取权值最小的边,因此用
min(f[u][v], w)赋值。 - 循环顺序:必须先枚举中转顶点 k,再枚举 i 和 j!如果顺序错误,会导致部分路径无法正确更新。
三、模板题实战:洛谷 B3647 【模板】Floyd
题目链接
题目描述
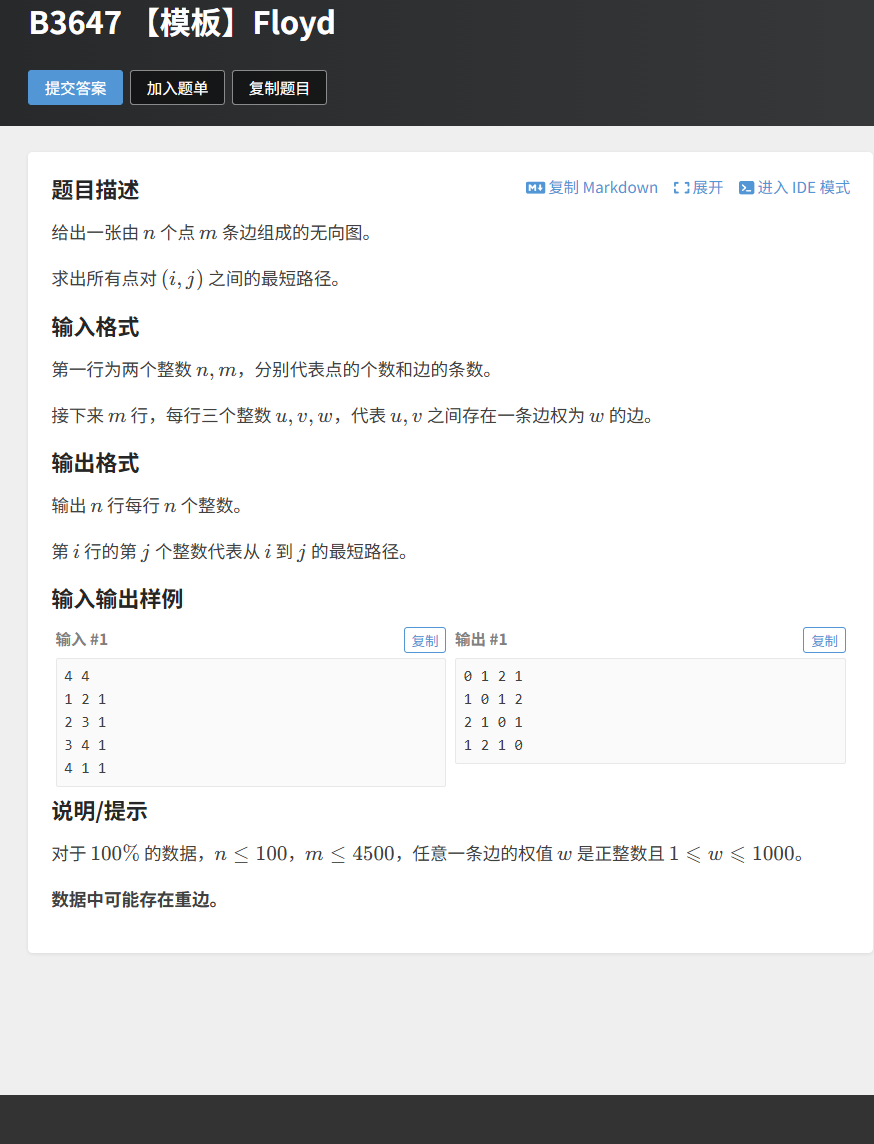
给出一张由n个点m条边组成的无向图,求出所有点对(i, j)之间的最短路径。
输入描述
- 第一行:两个整数
n、m,分别表示顶点数和边数; - 接下来
m行:每行三个整数u、v、w,表示顶点u和v之间有一条权值为w的无向边。
输出描述
输出n行,每行n个整数,第i行第j个整数表示顶点i到j的最短路径长度。
示例输入
4 4
1 2 1
2 3 1
3 4 1
4 1 1示例输出
0 1 2 1
1 0 1 2
2 1 0 1
1 2 1 0解题思路
这是 Floyd 算法的基础模板题,无向图可看作双向有向图,因此读入边时需同时更新f[u][v]和f[v][u]。直接套用 Floyd 算法框架即可。
完整 C++ 代码
#include <iostream>
#include <cstring>
using namespace std;
const int N = 110;
const int INF = 0x3f3f3f3f;
int n, m;
int f[N][N];
int main() {
// 初始化f数组
memset(f, 0x3f, sizeof f);
for (int i = 1; i <= N; ++i) {
f[i][i] = 0;
}
// 读入数据
cin >> n >> m;
for (int i = 0; i < m; ++i) {
int u, v, w;
cin >> u >> v >> w;
// 无向边,双向更新,保留最小权值(避免重边)
f[u][v] = min(f[u][v], w);
f[v][u] = min(f[v][u], w);
}
// Floyd核心算法
for (int k = 1; k <= n; ++k) {
for (int i = 1; i <= n; ++i) {
for (int j = 1; j <= n; ++j) {
if (f[i][k] != INF && f[k][j] != INF) {
f[i][j] = min(f[i][j], f[i][k] + f[k][j]);
}
}
}
}
// 输出结果
for (int i = 1; i <= n; ++i) {
for (int j = 1; j <= n; ++j) {
cout << f[i][j] << " ";
}
cout << endl;
}
return 0;
}代码解释
- 初始化时,
f[i][i] = 0,其余为INF; - 无向边需双向更新,避免重边影响(取最小权值);
- 三层循环严格按照
k → i → j的顺序,确保每个中间顶点都能正确更新路径; - 输出时直接打印
f[i][j],即为i到j的最短路径长度。
四、基础应用:洛谷 P2910 Clear And Present Danger
题目链接
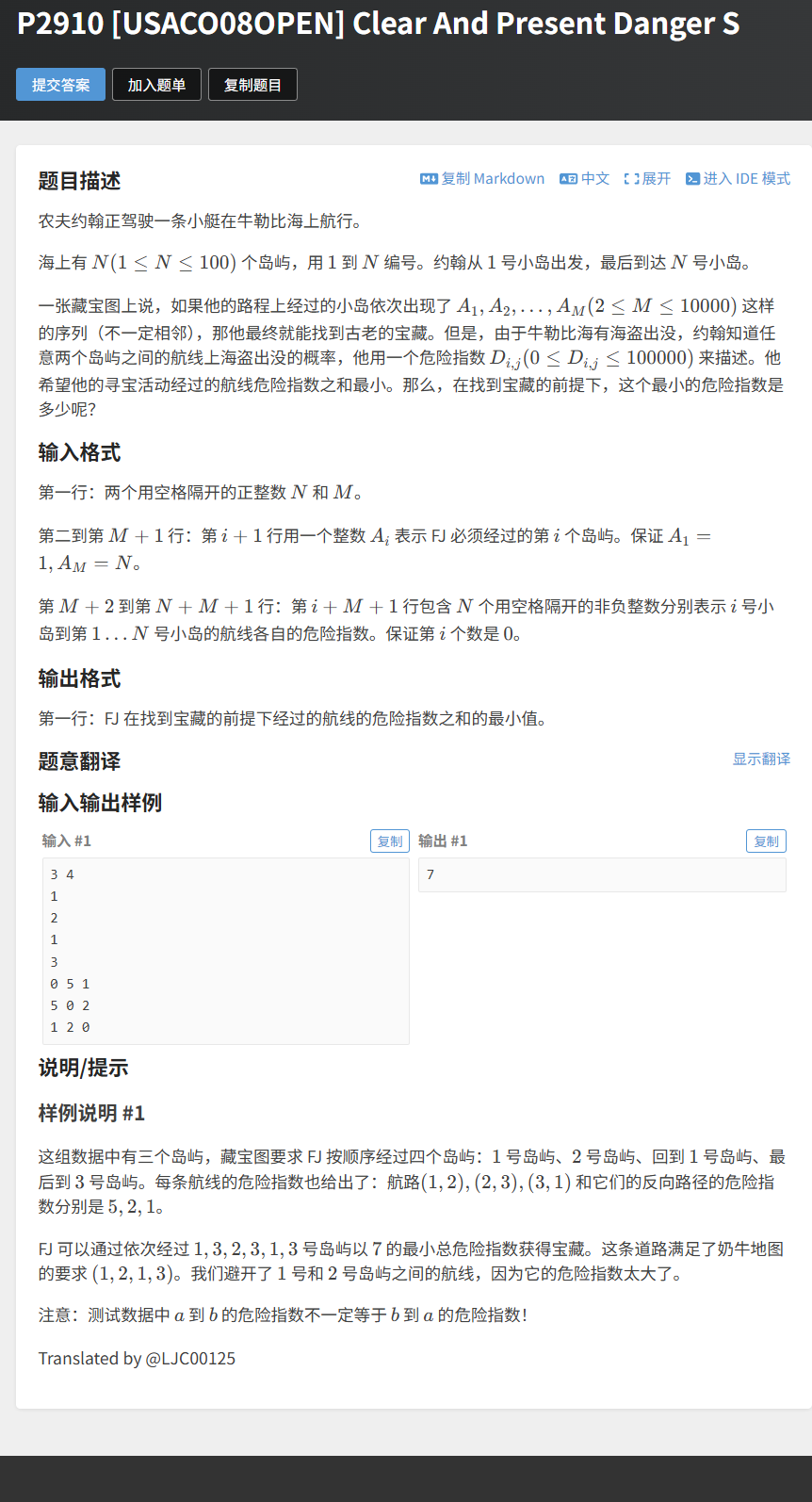
P2910 [USACO08OPEN] Clear And Present Danger S
题目描述
农夫约翰驾驶小艇在海上航行,海上有N个岛屿,编号 1~N。约翰需要按照藏宝图上的序列A₁, A₂, ..., Aₘ依次经过这些岛屿(从A₁出发,最后到Aₘ),求经过的航线危险指数之和的最小值。
危险指数D[i][j]表示岛屿i到j的直接航线危险指数(题目已给出所有D[i][j])。
输入描述
- 第一行:两个整数
N、M,分别表示岛屿数和必须经过的岛屿序列长度; - 接下来
M行:每行一个整数Aᵢ,表示必须经过的第i个岛屿; - 接下来
N行:每行N个整数,第i行第j个整数表示D[i][j](D[i][i] = 0)。
示例输入
3 4
1
2
1
3
0 5 1
5 0 2
1 2 0示例输出
7解题思路
- 题目给出的
D[i][j]是直接航线的危险指数,但可能存在经过其他岛屿的更短路径(危险指数更小); - 因此需要先通过 Floyd 算法求出所有岛屿对之间的最短危险指数(即任意两个岛屿之间的最优路径);
- 然后按照序列
A₁ → A₂ → ... → Aₘ,累加相邻岛屿的最短危险指数之和,即为答案。
完整 C++ 代码
#include <iostream>
#include <cstring>
typedef long long LL; // 防止结果溢出
using namespace std;
const int N = 110;
const int INF = 0x3f3f3f3f;
int n, m;
int f[N][N];
int a[10010]; // 存储必须经过的岛屿序列(M最大为1e4)
int main() {
// 读入岛屿数和序列长度
cin >> n >> m;
// 读入必须经过的岛屿序列
for (int i = 1; i <= m; ++i) {
cin >> a[i];
}
// 读入初始危险指数矩阵D[i][j],并初始化f数组
for (int i = 1; i <= n; ++i) {
for (int j = 1; j <= n; ++j) {
cin >> f[i][j];
}
}
// Floyd算法求所有岛屿对的最短危险指数
for (int k = 1; k <= n; ++k) {
for (int i = 1; i <= n; ++i) {
for (int j = 1; j <= n; ++j) {
if (f[i][k] != INF && f[k][j] != INF) {
f[i][j] = min(f[i][j], f[i][k] + f[k][j]);
}
}
}
}
// 累加序列中相邻岛屿的最短危险指数之和
LL res = 0;
for (int i = 2; i <= m; ++i) {
int u = a[i-1], v = a[i];
res += f[u][v];
}
// 输出结果
cout << res << endl;
return 0;
}代码解释
- 由于
M最大为 1e4,N最大为 100,f[i][j]最大为 1e5,累加和可能超过 int 范围,因此用long long存储结果; - 初始时
f[i][j]直接赋值为题目给出的D[i][j],无需额外初始化(题目已保证D[i][i]= 0); - 累加过程中,直接使用 Floyd 更新后的
f[u][v](u和v为序列中相邻岛屿),确保每一段都是最优路径。
五、进阶实战:洛谷 P1119 灾后重建
题目链接
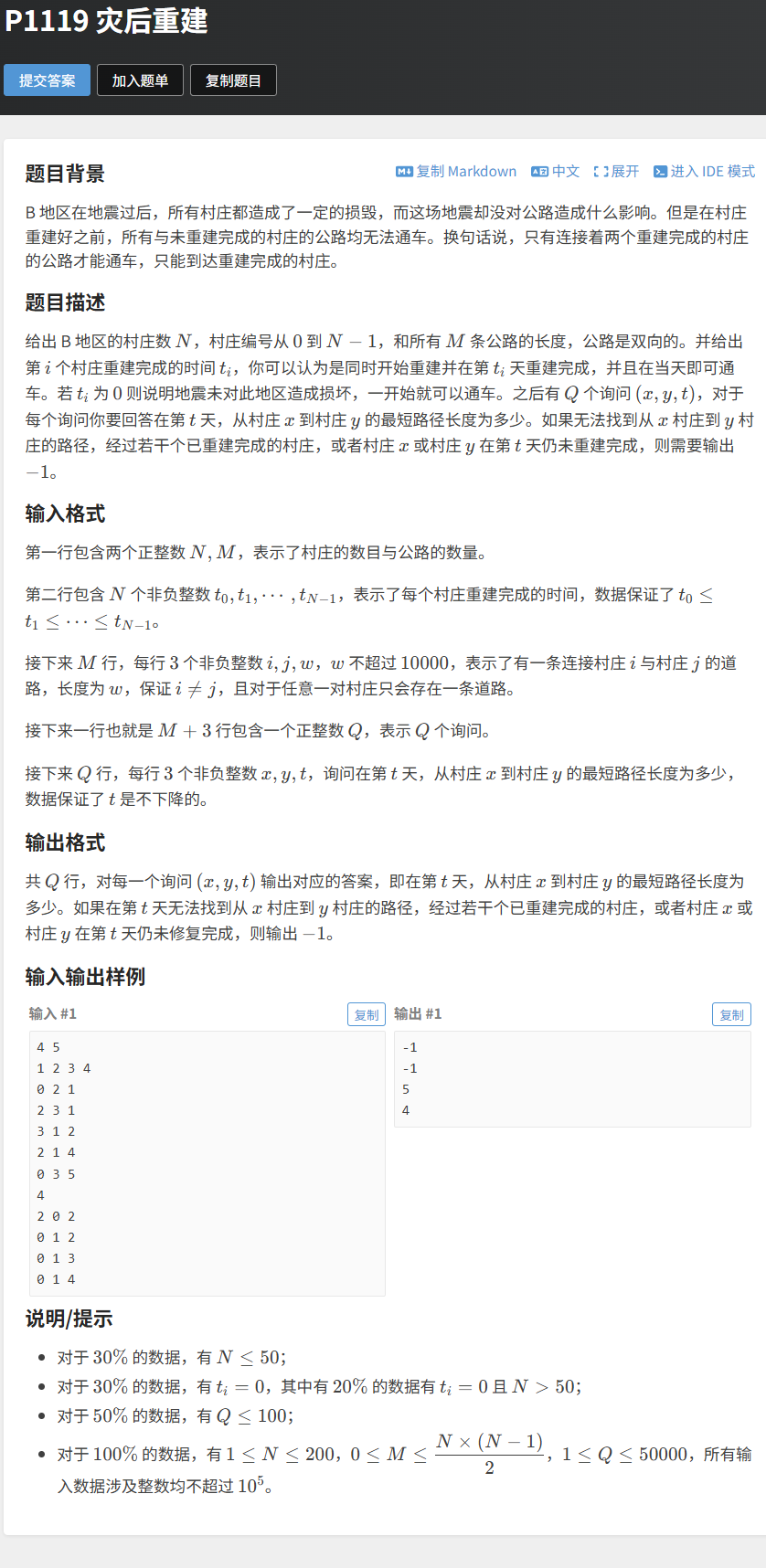
题目描述
B 地区有N个村庄(编号 0~N-1),M条双向公路。每个村庄i有一个重建完成时间t[i](t[i]为 0 表示初始即可通车),重建完成当天即可通车。有Q个询问(x, y, t),询问在第t天,村庄x到y的最短路径长度(路径必须经过已重建完成的村庄)。若无法到达(如x或y未重建、无路径),输出-1。
输入描述
- 第一行:两个整数
N、M,表示村庄数和公路数; - 第二行:
N个非负整数t[0], t[1], ..., t[N-1],表示每个村庄的重建时间(保证t非递减); - 接下来
M行:每行三个整数i、j、w,表示村庄i和j之间有一条长度为w的公路; - 接下来一行:整数
Q,表示询问数; - 接下来
Q行:每行三个整数x、y、t,表示询问(保证t非递减)。
示例输入
4 5
1 2 3 4
0 2 1
2 3 1
3 1 2
2 1 4
0 3 5
4
2 0 2
0 1 2
0 1 3
0 1 4示例输出
-1
-1
5
4解题思路
这道题是 Floyd 算法的经典进阶应用,核心在于理解 “重建时间” 对路径的限制 —— 只有重建完成的村庄才能作为中间顶点或路径上的顶点。
关键观察
- 村庄的重建时间
t是非递减的(t[0] ≤ t[1] ≤ ... ≤ t[N-1]); - 询问的时间
t也是非递减的; - Floyd 算法的 “插点法” 本质是依次将顶点作为中间顶点加入,更新路径。这与 “村庄按重建时间依次通车” 的过程完全契合!
算法设计
- 初始化 Floyd 数组
f,公路初始长度为给定w,无公路为INF,f[i][i] = 0; - 维护一个指针
pos,表示当前已重建完成的村庄(初始pos = 0); - 对于每个询问
(x, y, t):a. 先将所有重建时间≤ t的村庄(t[pos] ≤ t)作为中间顶点加入 Floyd 算法,更新路径(因为这些村庄已通车,可作为中转);b. 检查x和y是否已重建(t[x] ≤ t且t[y] ≤ t);c. 若已重建且f[x][y] != INF,输出f[x][y];否则输出-1。
为什么这样可行?
- 由于村庄重建时间和询问时间都是非递减的,一旦某个村庄被加入(作为中间顶点),后续的询问都可以使用它,无需重复处理;
- 每次询问前只需要处理新增的已重建村庄,避免了重复计算,时间复杂度优化为
O(Q + N² + M)(因为每个村庄最多被处理一次,每次处理O(N²))。
完整 C++ 代码
#include <iostream>
#include <cstring>
using namespace std;
const int N = 210;
const int INF = 0x3f3f3f3f;
int n, m, q;
int t[N]; // 每个村庄的重建时间
int f[N][N]; // Floyd数组
// 加入村庄k作为中间顶点,更新所有路径
void floyd(int k) {
for (int i = 0; i < n; ++i) {
for (int j = 0; j < n; ++j) {
if (f[i][k] != INF && f[k][j] != INF) {
f[i][j] = min(f[i][j], f[i][k] + f[k][j]);
}
}
}
}
int main() {
// 初始化Floyd数组
memset(f, 0x3f, sizeof f);
for (int i = 0; i < N; ++i) {
f[i][i] = 0;
}
// 读入村庄数和公路数
cin >> n >> m;
// 读入每个村庄的重建时间
for (int i = 0; i < n; ++i) {
cin >> t[i];
}
// 读入公路信息
for (int i = 0; i < m; ++i) {
int u, v, w;
cin >> u >> v >> w;
f[u][v] = min(f[u][v], w);
f[v][u] = min(f[v][u], w); // 无向公路,双向更新
}
// 读入询问数
cin >> q;
int pos = 0; // 当前已处理的最后一个村庄(已重建完成)
while (q--) {
int x, y, time;
cin >> x >> y >> time;
// 将所有重建时间≤当前询问时间的村庄加入Floyd
while (pos < n && t[pos] <= time) {
floyd(pos);
pos++;
}
// 检查x和y是否已重建,且存在路径
if (t[x] > time || t[y] > time || f[x][y] == INF) {
cout << -1 << endl;
} else {
cout << f[x][y] << endl;
}
}
return 0;
}代码解释
- 村庄编号从 0 开始(与题目一致),因此数组初始化和循环均从 0 开始;
floyd(k)函数的作用是将村庄k作为中间顶点,更新所有顶点对的最短路径;- 指针
pos的作用是 “懒加载” 已重建的村庄,避免重复处理,优化时间复杂度; - 询问处理时,先确保所有已重建的村庄都被作为中间顶点加入,再判断路径是否存在。
六、拓展应用:洛谷 P6175 无向图的最小环问题
题目链接

题目描述
给定一张无向图,求图中一个至少包含 3 个顶点的环,使得环上所有边的权值之和最小(即最小环)。若无环,输出No solution.。
输入描述
- 第一行:两个整数
n、m,表示顶点数和边数; - 接下来
m行:每行三个整数u、v、d,表示顶点u和v之间有一条权值为d的无向边。
示例输入
5 7
1 4 1
1 3 300
3 1 10
1 2 16
2 3 100
2 5 15
5 3 20示例输出
61解题思路
最小环问题是多源最短路的经典拓展,Floyd 算法可以巧妙地解决这个问题。
核心观察
无向图中的最小环,必然可以表示为i → ... → k → j → i,其中:
k是环中编号最大的顶点;i和j是环中与k直接相连的两个顶点;i → ... → j的路径中不包含k(因为k是最大编号顶点),因此这条路径的最短长度就是f[k-1][i][j](只允许经过顶点 1~k-1 时的最短路径)。
因此,最小环的长度可以表示为:f[k-1][i][j] + w[i][k] + w[k][j],其中w[i][k]是i到k的直接边权,w[k][j]是k到j的直接边权。
算法设计
- 初始化 Floyd 数组
f和原始边权数组w(w[i][j]存储i到j的直接边权); - 枚举中间顶点
k(从 1 到 n):a. 在更新f[k][i][j]之前,先枚举所有i < k、j < k、i != j,计算f[k-1][i][j] + w[i][k] + w[k][j],并更新最小环长度;b. 然后正常执行 Floyd 的状态转移,更新f[k][i][j]; - 枚举结束后,若最小环长度仍为无穷大,输出
No solution.,否则输出最小环长度。
关键细节
- 必须在更新
f[k][i][j]之前计算最小环,因为此时f[i][j]仍保持着 “只允许经过 1~k-1” 的状态; - 原始边权数组
w需要单独保存,不能被 Floyd 更新覆盖,因为w[i][k]是i到k的直接边权,而非最短路径。
完整 C++ 代码
#include <iostream>
#include <cstring>
using namespace std;
const int N = 110;
const int INF = 1e8; // 无穷大(避免溢出)
int n, m;
int f[N][N]; // Floyd数组,存储最短路径
int w[N][N]; // 原始边权数组,存储直接边权
int min_cycle = INF; // 最小环长度
int main() {
// 初始化f和w数组
for (int i = 1; i <= N; ++i) {
for (int j = 1; j <= N; ++j) {
f[i][j] = w[i][j] = INF;
}
f[i][i] = w[i][i] = 0;
}
// 读入顶点数和边数
cin >> n >> m;
for (int i = 0; i < m; ++i) {
int u, v, d;
cin >> u >> v >> d;
// 无向边,双向更新,保留最小边权(避免重边)
w[u][v] = w[v][u] = min(w[u][v], d);
f[u][v] = f[v][u] = min(f[u][v], d);
}
// Floyd算法求最短路径,并同时找最小环
for (int k = 1; k <= n; ++k) {
// 步骤1:找包含k的最小环(k是环中最大编号顶点)
for (int i = 1; i < k; ++i) {
for (int j = i + 1; j < k; ++j) {
// 环的长度 = i到j的最短路径(不经过k) + i到k的直接边 + k到j的直接边
if (f[i][j] != INF && w[i][k] != INF && w[k][j] != INF) {
min_cycle = min(min_cycle, f[i][j] + w[i][k] + w[k][j]);
}
}
}
// 步骤2:正常更新Floyd数组(插入k作为中间顶点)
for (int i = 1; i <= n; ++i) {
for (int j = 1; j <= n; ++j) {
if (f[i][k] != INF && f[k][j] != INF) {
f[i][j] = min(f[i][j], f[i][k] + f[k][j]);
}
}
}
}
// 输出结果
if (min_cycle == INF) {
cout << "No solution." << endl;
} else {
cout << min_cycle << endl;
}
return 0;
}代码解释
- 单独维护
w数组存储原始边权,避免被 Floyd 更新覆盖; - 枚举
k时,先找包含k的最小环(i < k、j < k确保k是环中最大编号顶点),再更新 Floyd 数组; - 最小环的长度是
i→j的最短路径(不经过k)加上i→k和k→j的直接边权,确保环的完整性和最小性。
七、Floyd 算法的优化与注意事项
1. 空间优化
Floyd 算法的空间复杂度是O(n²),对于n=1000的场景,n²=1e6,内存占用约 4MB(int 类型),完全可以接受;但对于n=1e4,n²=1e8,内存占用约 400MB,会超出内存限制。此时可以考虑:
- 若只需查询部分顶点对的最短路径,可使用多源 Dijkstra(对每个顶点跑一次 Dijkstra);
- 对于稀疏图,多源 Dijkstra 的时间复杂度
O(n m log n)可能优于 Floyd 的O(n³)。
2. 避免溢出
- 无穷大
INF的取值要合适,不能太大(否则INF + INF会溢出),也不能太小(否则会与实际边权冲突)。通常取0x3f3f3f3f(约 1e9),因为0x3f3f3f3f + 0x3f3f3f3f = 2e9,小于 int 的最大值(2^31-1=2147483647); - 若边权较大或顶点数较多,需用
long long存储f[i][j],避免累加和溢出。
3. 处理重边和自环
- 重边:保留权值最小的边(如
w[u][v] = min(w[u][v], d)); - 自环:由于
f[i][i] = 0,自环的边权不会影响最短路径(因为i→i的最短路径长度为 0),因此可以忽略自环(或在初始化时不处理自环)。
4. 负环的检测
Floyd 算法本身无法直接检测负环,但可以通过以下方法判断:
- 运行 Floyd 算法后,若存在
f[i][i] < 0,则说明顶点i在一个负环上(因为自己到自己的最短路径长度为负数,存在负环); - 若只需检测是否存在负环,建议使用 Bellman-Ford 或 SPFA 算法(效率更高)。
总结
Floyd 算法是多源最短路的核心算法,代码简洁、思想巧妙,虽然时间复杂度为
O(n³),但在顶点数较小的场景(n ≤ 200)中效率很高,且能处理有向图、无向图、带权图(非负权或负权无负环)等多种情况。 Floyd 算法虽然简单,但蕴含的动态规划思想和 “插点法” 技巧值得深入思考。希望通过本文的学习,你能彻底掌握多源最短路问题,并能灵活应对各类实战场景!如果有任何疑问或问题,欢迎在评论区交流讨论~
本文参与 腾讯云自媒体同步曝光计划,分享自作者个人站点/博客。
原始发表:2025-12-21,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号