疯狂的 Rust 机器人新框架 ,比 ROS2 快 575 倍

疯狂的 Rust 机器人新框架 ,比 ROS2 快 575 倍

niqin.com
发布于 2026-03-18 16:43:20
发布于 2026-03-18 16:43:20
“ HORUS,是一个新开源的生产级 Rust 机器人框架。
2026 年 1 月 9 日宣布,声称其性能比 ROS2 快 575 倍,具有亚微秒的 IPC 延迟。HORUS 由 Softmata 团队构建,定位为“机器人的 Android”,通过零拷贝共享内存和无锁架构解决了开发人员对 ROS2 复杂性和性能瓶颈的不满。”
“速度不是一切,但在这场竞赛中,它是唯一的筹码。” —— 改编自电影《极速风流》
在机器人领域,时间从来不是抽象的概念。
它意味着机械臂能否在空中抓住一个滚落的零件,意味着自动驾驶汽车能否在毫秒间避开障碍,意味着一个系统是“智能”,还是“迟钝”。
ROS2 长期以来是这一领域的实际标准。但它诞生于一个 CPU 性能每年提升 50% 的时代,其设计隐含着一个如今正在失效的假设:硬件总会越来越快。
我们进入了后摩尔定律时代。
现在,一个名为 Horus 的新框架,用 Rust 语言给出了另一种答案:不依赖硬件提速,而是重构软件本身。
2026 年 1 月 9 日,一个名叫 Horus 的机器人框架发布了。
它的团队 Softmata 给它贴了个标签:“机器人的 Android”。口气不小。但它甩出来的数据更唬人:比 ROS2 快 575 倍,IPC 延迟做到亚微秒级。
注:什么亚微秒?一微秒是百万分之一秒,一微秒是 1000 纳秒。亚微秒是指少于 1 微秒,但不是 0。好奇的你应该问:那为什么不说纳秒级呢?因为用纳秒数字就太大咯。
575 倍。这数字要么是营销注水,要么是重新发明了轮子——而且这轮子是碳纤维的。
但看完技术文档,倾向于后者。
ROS2 的困境:当“工业标准”变成“工业负担”
2025 年,ROS1 正式结束支持。还在跑着 ROS1 的机器人团队,被推到了岔路口:要么迁移到 ROS2,要么找条新路。
很多人选了 ROS2,然后后悔了。
性能倒车是最直接的耳光。有开发者在论坛里吐槽:“简单节点在 ROS1 只占几个点的 CPU,到了ROS2 吃掉整个核心。”这不是优化问题,是架构问题。对于高带宽传感器——摄像头、深度相机、3D 激光雷达——这种倒退是致命的。
注:ROS2 改用 DDS(数据分发服务)作为通信中间件。DDS 是企业级标准,功能强大,但抽象层厚、开销大。用 DDS 做机器人通信,相当于用集装箱货轮送外卖——能送,但别嫌慢。
一位被逼急了的开发者直接开干:“我受够了 ROS2,就用 Rust 重写了一遍。”——这话后来成了 Horus 文档里的题词。
复杂度的膨胀比性能更让人头疼。ROS2 被批评有 “身份认知障碍:明明是个框架,却觉得自己是操作系统”。想跑起来一个节点,先敲 10 几条命令:工作空间管理、环境变量 sourcing、DDS 配置……还没开始写代码,已经累了。
单元测试“设计上就很复杂”——分布式架构的馈赠。阻塞回调让你在回调里收不到 tf 变换(注:tf 是 ROS 里的坐标变换系统),只能写各种别扭的 workaround。
Horus 团队盯上的,就是这些痛点。
575 倍怎么来的:零拷贝 + 锁无关
Horus 的加速有两个引擎,都靠Rust 的内存安全撑起来。
第一个引擎:零拷贝共享内存 IPC
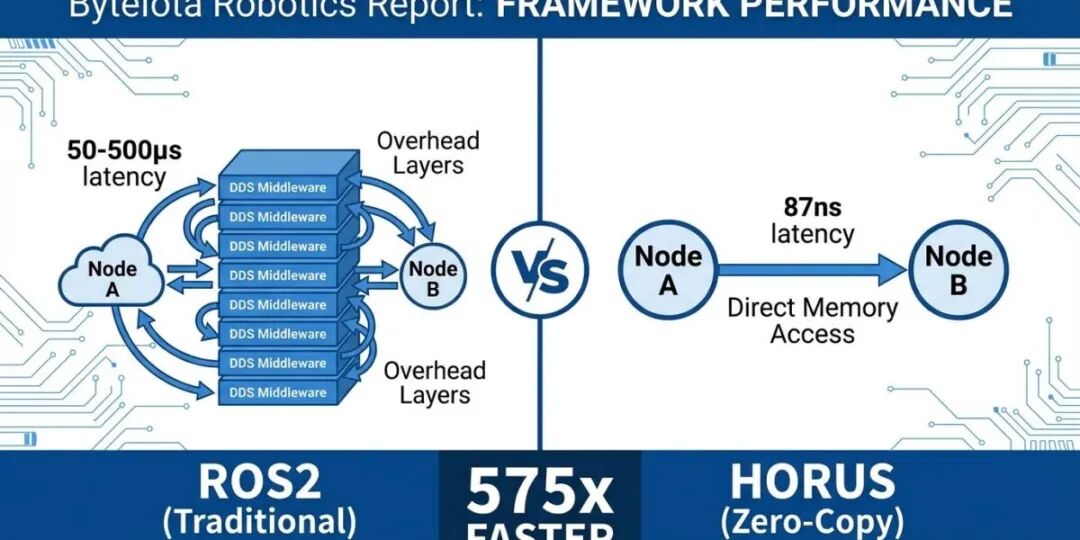
传统框架(ROS2)怎么做通信?发消息时序列化,塞进 DDS,收消息时反序列化。每次拷贝都在烧时间,高频场景下这开销能把 CPU 点着。
Horus 把这套流程直接删了。发布者往共享内存(Linux 下的 /dev/shm/horus/)里写数据,订阅者拿个引用去读——零拷贝,零序列化。
注:共享内存不是什么黑科技,但敢在框架层默认用共享内存,需要 Rust 的所有权系统兜底——编译器确保没人一边读一边改,不用加锁,不会崩。C++ 不是不能做,是做了之后 bug 能让你调到怀疑人生。
研究数据说,零拷贝 IPC 对机器人负载能带来 2-3 个数量级的提升。什么意思?传一张 4MB图像,从几十毫秒压到几百微秒。
第二个引擎:锁无关数据结构
Rust 在编译期就把数据竞争堵死了,这让无锁、免等待的通信成为可能。没有线程争抢,没有死锁,没有优先级反转——对硬实时控制(<1ms 循环)来说,这是刚需。
数据是硬通货:
- 单生产者/单消费者通道:中位延迟 87ns
- 多生产者/多消费者枢纽:313ns
- 电机控制命令(CmdVel):296ns,每秒 338 万条消息
- 2D 激光雷达数据(LaserScan):1.31μs,每秒 76.2 万条消息
对比一下:ROS2 的延迟在 50-500μs 之间。同等负载下,慢 50-500 倍。
当 ROS2 还在为“大 topic”头疼时,Horus 能跑到 每秒 600 万+ 条消息。这不是数字游戏——这是传感器融合是流畅还是卡顿、CPU 是闲着还是烧满的区别。
混血架构:Rust 干脏活,Python干累活
Horus 没有逼你全盘 Rust。
它的设计是混血的:Rust 负责硬实时控制(电机驱动、传感器融合、安全监控,<1ms 循环那种),Python 负责高层逻辑(AI 模型、计算机视觉、路径规划,用 maturin 绑定,Python 3.9+ 可用)。两边通过同一份 topic 通信,零拷贝的优势共享。
这套逻辑很务实:硬实时的地方要确定性,要内存安全,那是 Rust 的战场;算法层要生态,要迭代速度,Python 的活儿 Python 干。
开发体验也做了减法。Horus 用宏(node!、message!)减少样板代码,对比 ROS2 那套啰嗦的生命周期管理,算是降维打击。编译时类型检查把一堆运行时错误提前掐死。
硬件支持走“电池包含”路线:32 个驱动直接打包。
- 通信总线:SocketCAN、SPI、I2C
- 执行机构:Dynamixel 舵机、Roboclaw 电机控制器、步进电机、BLDC/ESC
- 传感器:超声波、功率监视器、力/扭矩传感器、RealSense 深度相机
有个细节很用心:硬件驱动条件编译。
硬件不在的时候,节点自动回退到仿真模式——在笔记本上开发,不需要改代码。
上手:一个命令,而不是一节课
ROS2 的上手成本:新建工作空间、source环境、装依赖、配 DDS……够写一篇小作文。
Horus 的上手:
git clone https://github.com/softmata/horus.git
cd horus
./install.sh前提条件:Rust 1.70+(推荐1.85+)、常见构建工具(gcc、pkg-config)、平台库(OpenSSL、udev、ALSA)。Python 3.9+ 可选。
安装脚本往 ~/.horus/cache/ 里放五个核心库:
- horus_core:运行时和调度器
- horus:主框架
- horus_macros:宏
- horus_library
- horus_py:Python 绑定
跨平台支持是原生级的:Ubuntu 20.04+、树莓派(官方 ARM64 测试)、macOS、Windows、WSL2。
每个平台用各自的共享内存路径,不用操心。
CLI 工具:
- horus new:新建项目
- horus run:运行
- horus monitor:实时可视化
- horus sim:仿真控制
装完跑 ./verify.sh,能看到彩色输出告诉你系统状态。
什么时候选 Horus,什么时候选 ROS2
Horus 不是来“取代” ROS2 的——这种话术太像忽悠投资人的 PPT。更真实的定位是:特定场景下,它是更好的选择。
选 Horus 的情况:
- 硬实时控制(<1ms 循环)
- 安全关键系统(手术机器人、自动驾驶)
- 性能瓶颈场景(高频传感器、ROS2 被“大 topic”卡住的地方)
- 边缘/嵌入式部署(树莓派级别、电池供电)
- 新项目 + 团队有 Rust 能力 + 内存安全不可妥协
选 ROS2 的情况:
- 生态成熟度优先——几千个现存包、工业标准集成(比如 FANUC 支持)、庞大社区、成熟工具链
- 已经深度绑定 ROS2,迁移成本 > 收益
- 团队没有 Rust 经验,或者项目环境风险大,需十年以上的生产案例背书
现实的剧本可能是:共存,而非取代。Horus 负责性能关键子系统,ROS2 负责通用基础设施。混合部署比全盘替换更可能成为常态。
代价与风险
Horus 才三个月大(项目始于2025 年 10 月),GitHub 星星 123 颗。生态基本是荒地。Rust 的所有权模型有学习曲线——这是真话,不是谦虚。
ROS2 的成熟度和网络效应是它的护城河。Horus 目前只是护城河外喊话的那一个。
但对于那些被 ROS2 逼疯的开发者——受够了复杂、受够了性能税、受够了“框架以为自己是个操作系统”——Horus 提供了一个看着很美的选择:
现代语言、零拷贝速度、开箱即用的驱动,以及一个承诺:机器人框架可以变简单,而不必变弱。
或许,Horus 目前还是 PPT 画饼,但我必须给这个饼一个星星 😊
参考文章:
Horus: A Rust-Based Robotics Framework 575x Faster Than ROS2
谢谢您的阅读,欢迎交流。如果您发现错别字,也请向我发信息。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-03-07,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号