基于点云强度信息和几何关系的闭环检测


文章:Intensity Scan Context: Coding Intensity and Geometry Relations for Loop Closure Detection
作者:Han Wang, Chen Wang, and Lihua Xie
编辑:点云PCL
代码:https://github.com/wh200720041/iscloam.git
未经作者允许请勿转载,欢迎各位同学积极分享和交流。
摘要
闭环检测是同时定位和地图构建(SLAM)中的一个重要且具有挑战性的问题。由于其视点和光照不变性,通常使用激光雷达(LiDAR)传感器来解决这个问题,现有的3D闭环检测方法通常利用局部或全局几何描述子的匹配,但没有考虑强度信息。本文探索了LiDAR扫描的强度属性,并表明它可以有效用于地点识别。具体是提出了一种新颖的全局描述子,即扫描帧强度上下文(ISC),它同时探索了几何关系和强度特征。为了提高闭环检测的效率提出了一个高效的两阶段分层重新识别过程,包括基于二进制操作的快速几何关系检索和强度结构重新识别。我们进行了详尽的实验证明,包括本地实验和公共数据集测试,来评估所提方法的性能。该方法在召回率和召回精度方面比现有的仅依赖几何方法表现更好。
主要贡献
本文提出了一种新颖的全局描述子—扫描帧强度上下文(ISC)用于闭环检测,它融合了几何和强度特征。首先,我们解释了强度信息如何对一个地点进行区分。然后提出了扫描帧强度上下文作为地点识别的全局标志。为了进一步提高算法的效率,提出了一个两阶段分层的地点重新识别策略,包括基于二进制操作的快速几何检索和强度结构匹配。为了评估所提出的扫描帧上下文的性能,我们的方法在不同场景下进行了测试,包括户外自动驾驶和室内仓库机器人导航。结果显示所提出的方法在召回率和召回精度方面均优于现有的仅几何的闭环检测方法。本文的主要贡献如下:
- 我们提出了一种新颖的全局描述子用于融合3D LiDAR扫描的几何和强度特征。
- 我们提出了一种高效的闭环检测策略,基于两阶段分层的扫描帧强度上下文(ISC)重新识别,平均每次查询仅耗时1.2毫秒。
- 进行了对所提出描述子的全面评估,包括本地实验和公共数据集测试。
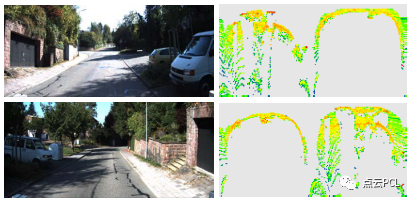
图1:从KITTI序列中检测到的闭环示例,由于反向访问,该场景具有挑战性。我们在右侧图像中展示的所提出的扫描帧强度上下文显示出高相似性识别到了闭环。
主要内容
强度标定和预处理
这一部分主要介绍了激光雷达的强度校准和预处理过程,激光雷达通过发射和接收激光束来感知环境,通常通过行驶时间来测量距离值,同时通过返回的能量级别(即强度)来估计表面反射率,文章指出强度读数可以反映周围表面的反射结构,不同的物体返回不同的强度值。为了验证这一点,作者展示了来自KITTI数据集的一个示例,并用红色矩形框标注了三个地标(车辆、道路标志和建筑物),从中观察到了反射率的差异。
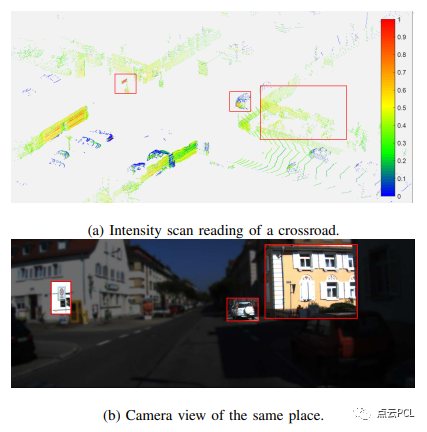
图2:来自KITTI数据集的强度读数示例,强度信息与地标之间的关系用红色矩形进行了标注。
扫描帧强度上下文
这一部分介绍了"Intensity Scan Context"(ISC)的提出ISC是一种全局描述子,通过整合几何和强度特征用于闭环检测。在这里作者受到了扫描上下文(scan context)和形状上下文(shape context)的启发,将强度信息作为全局描述符,ISC的引入使得地点识别的过程更加高效,并且能够有效地集成几何和强度特征。
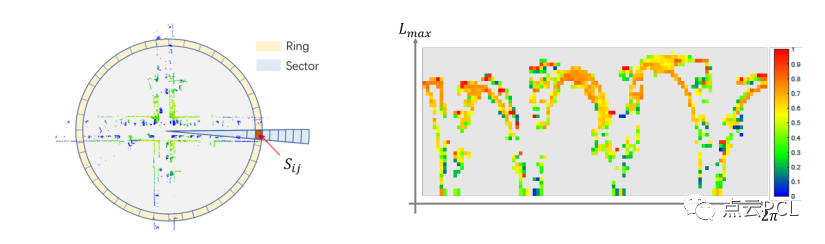
图3:所提出的扫描帧强度上下文的可视化说明。左图:原始点云根据几何特征被分解成子空间。右图:通过在子空间上进行强度投影得到的扫描帧强度上下文。
位置重识别
这里介绍了两阶段的层次化地点重新识别策略,首先是基于二进制运算的快速几何关系检索,其目的是提高算法的计算效率。其次是强度结构匹配,这一步骤是ISC描述符的具体匹配过程,整个重新识别策略使得算法在进行地点识别时能够更快速地定位闭环。
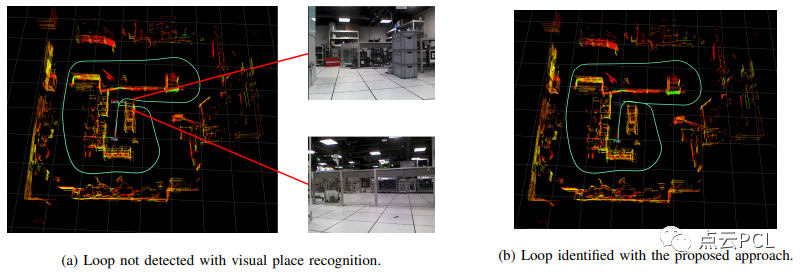
图5:所提出算法的局部回环检测实验结果。
一致性验证
在闭环检测过程中,可能会出现误检测或漏检测的情况,因此需要进行验证,主要从空间一致性和几何一致性确保闭环检测的准确性和稳健性。
实验
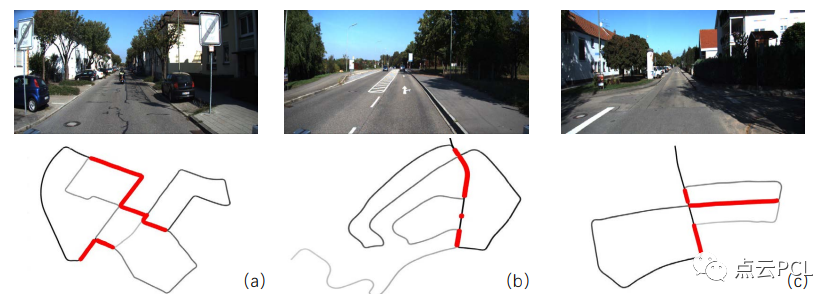
图6:回环检测结果(a) KITTI序列00。(b) KITTI序列02。(c) KITTI序列05。
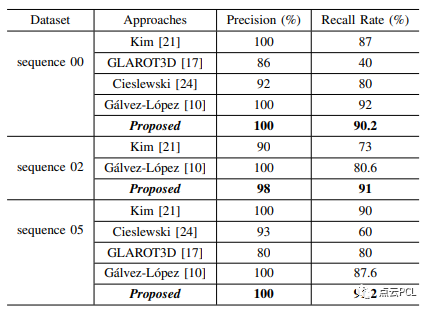
与基于视觉的方法相比,该方法在序列00和序列05上实现了有竞争力的准确率和召回率,在更具挑战性的数据集序列02上,我们的方法实现了更高的召回率,这是因为在序列02中,基于视觉的方法无法识别出反向访问,从而导致召回率显著下降。
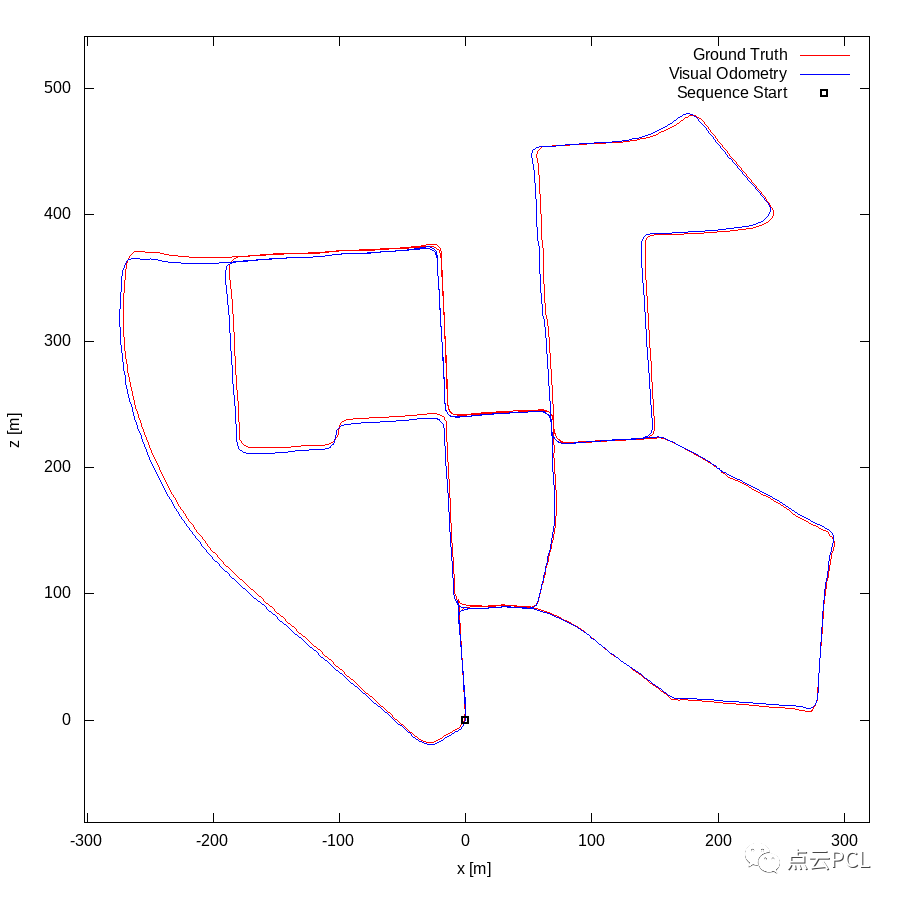
Localization Example
Ground Truth Comparison(Green: ISCLOAM Red: Ground Truth)
总结
在本文提出了一种强大的闭环检测方法,通过整合几何和强度信息。现有的基于LiDAR的闭环检测方法主要利用仅凭几何的描述子,忽略了强度信息,受到最近对LiDAR强度的研究启发,我们认为强度信息对于地点识别是有效的,并提出了一种名为扫描帧强度上下文的全局三维描述子。为了降低计算成本,我们提出了一种高效的两阶段层次强度扫描上下文检索方法,包括快速的基于二进制操作的几何索引和强度结构的重新识别。在实践中,每个查询仅需要1.2毫秒的计算时间。对此进行了彻底的实验,包括与自动仓库机器人的本地运行测试和对公共数据集的测试,以评估我们提出的方法。结果表明我们提出的方法在召回精度和召回率方面与最先进的方法相比取得了有竞争力的结果。
资源
自动驾驶及定位相关分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
自动驾驶中基于光流的运动物体检测
基于语义分割的相机外参标定
综述:用于自动驾驶的全景鱼眼相机的理论模型和感知介绍
高速场景下自动驾驶车辆定位方法综述
Patchwork++:基于点云的快速、稳健的地面分割方法
PaGO-LOAM:基于地面优化的激光雷达里程计
多模态路沿检测与滤波方法
多个激光雷达同时校准、定位和建图的框架
动态的城市环境中杆状物的提取建图与长期定位
非重复型扫描激光雷达的运动畸变矫正
快速紧耦合的稀疏直接雷达-惯性-视觉里程计
基于相机和低分辨率激光雷达的三维车辆检测
用于三维点云语义分割的标注工具和城市数据集
ROS2入门之基本介绍
固态激光雷达和相机系统的自动标定
激光雷达+GPS+IMU+轮速计的传感器融合定位方案
基于稀疏语义视觉特征的道路场景的建图与定位
自动驾驶中基于激光雷达的车辆道路和人行道实时检测(代码开源)
用于三维点云语义分割的标注工具和城市数据集
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
TOF相机原理介绍
TOF飞行时间深度相机介绍
结构化PLP-SLAM:单目、RGB-D和双目相机使用点线面的高效稀疏建图与定位方案
开源又优化的F-LOAM方案:基于优化的SC-F-LOAM
【开源方案共享】ORB-SLAM3开源啦!
【论文速读】AVP-SLAM:自动泊车系统中的语义SLAM
【点云论文速读】StructSLAM:结构化线特征SLAM
SLAM和AR综述
常用的3D深度相机
AR设备单目视觉惯导SLAM算法综述与评价
SLAM综述(4)激光与视觉融合SLAM
Kimera实时重建的语义SLAM系统
SLAM综述(3)-视觉与惯导,视觉与深度学习SLAM
易扩展的SLAM框架-OpenVSLAM
高翔:非结构化道路激光SLAM中的挑战
基于鱼眼相机的SLAM方法介绍
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2023-08-03,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号