啥是卷积核?动画演示


在机器学习篇章中,我们简单介绍了卷积核,今天,我们借助知乎的一篇文章,梳理一下对卷积核一些基本情况。
什么是卷积核
在数学上,卷积核的标准定义是两个函数在反转和移位后的乘积的积分:

其中,函数g一般称为过滤器(filters),函数f指的是信号/图像。在卷积神经网络里,卷积核其实就是一个过滤器,但在深度学习里,它不做反转,而是直接执行逐元素的乘法和加法,我们把这个又称为互相关,在深度学习里称为卷积。
那为什么在图像处理上,需要进行卷积处理呢。实际上是借鉴于科学家的研究结果——上个世纪科学家就发现,视觉皮层的很多神经元都有一个小的局部感受野,神经元只对有限区域的感受野上的刺激物做出反应。不同的感受野可以重叠,他们共同铺满整个视野。并且发现,一些神经元仅仅对横线有反应,有一些神经元对其他方向的线条有反应,有些神经元的感受野比较大。因此,高级别的神经元的刺激是源于相邻低级别神经元的反应。
利用这个观点,经过不断的努力,逐渐发展成了现在的卷积神经网络。通过卷积核提取图像的局部特征,生成一个个神经元,再经过深层的连接,就构建出了卷积神经网络。
我们已经知道,一个卷积核一般包括核大小(Kernel Size)、步长(Stride)以及填充步数(Padding),我们逐一解释下。
卷积核大小:卷积核定义了卷积的大小范围,在网络中代表感受野的大小,二维卷积核最常见的就是 3*3 的卷积核。一般情况下,卷积核越大,感受野越大,看到的图片信息越多,所获得的全局特征越好。但大的卷积核会导致计算量的暴增,计算性能也会降低。
步长:卷积核的步长代表提取的精度, 步长定义了当卷积核在图像上面进行卷积操作的时候,每次卷积跨越的长度。对于size为2的卷积核,如果step为1,那么相邻步感受野之间就会有重复区域;如果step为2,那么相邻感受野不会重复,也不会有覆盖不到的地方;如果step为3,那么相邻步感受野之间会有一道大小为1颗像素的缝隙,从某种程度来说,这样就遗漏了原图的信息。
填充:卷积核与图像尺寸不匹配,会造成了卷积后的图片和卷积前的图片尺寸不一致,为了避免这种情况,需要先对原始图片做边界填充处理。
卷积的通道形式
所谓的通道数,可以理解为有多少张二维矩阵图。
- 单通道形式
对于具有1个通道的图像,下图演示了卷积的运算形式:
这里的filter是一个3*3矩阵,步长是1,填充为0。filter在输入数据中滑动。在每个位置,它都在进行逐元素的乘法和加法。每个滑动位置以一个数字结尾,最终输出为3 x 3矩阵。
- 多通道形式
多通道也很容易理解,最典型的就是处理彩色图片,一般有三个通道(RGB):

实际上,一个filter也可以包含多个矩阵,也即kernels,比如一个包含三个kernels的filter,对于输入是三个通道的图像:
这里输入层是一个5 x 5 x 3矩阵,有3个通道,filters是3 x 3 x 3矩阵。首先,filters中的每个kernels分别应用于输入层中的三个通道,执行三次卷积,产生3个尺寸为3×3的通道。
然后,将这三个通道相加(逐个元素相加)以形成一个单个通道(3 x 3 x 1),该通道是使用filters(3 x 3 x 3矩阵)对输入层(5 x 5 x 3矩阵)进行卷积的结果:
由此,我们引出卷积核的另外一个参数——输入输出通道数。
输入和输出通道数:卷积核的输入通道数由输入矩阵的通道数所决定(输入深度);输出矩阵的通道数由卷积核的输出通道数(卷积层深度,即多少个filters)所决定。
2D卷积与3D卷积
上面的多通道过程解释的详细点:
假设输入层有 Din 个通道,而想让输出层的通道数量变成 Dout,我们需要做的仅仅是将 Dout个filters应用到输入层中。每一个filters都有Din个卷积核,都提供一个输出通道。在应用Dout个filters后,Dout个通道可以共同组成一个输出层。
我们把上面的卷积过程称为2D-卷积——通过使用Dout个filters,将深度为Din的层映射为另一个深度为Dout的层。

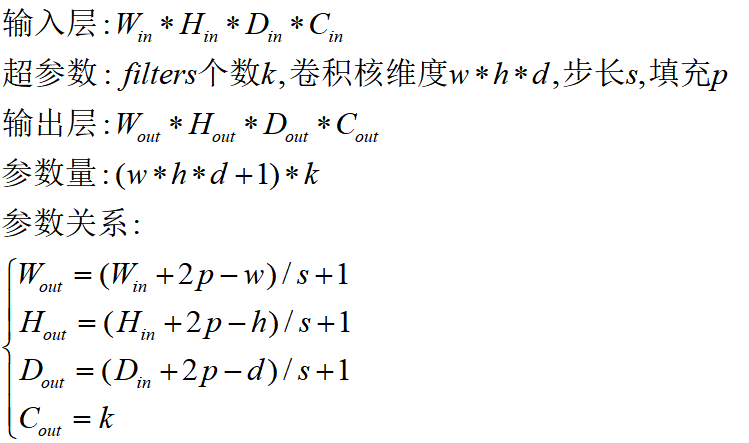
进一步,我们给出2D-卷积的公式:
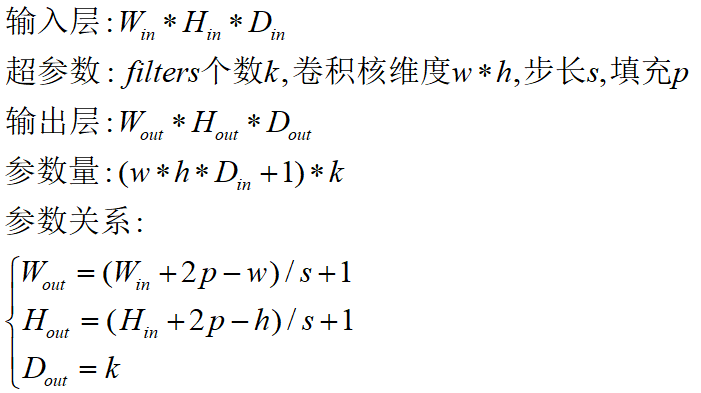
特别的,对于卷积核,如果w=h=1,那么就退化为1*1卷积核,它具有以下三个优点:
- 降维以实现高效计算
- 高效的低维嵌入特征池
- 卷积后再次应用非线性
下图是一个例子:
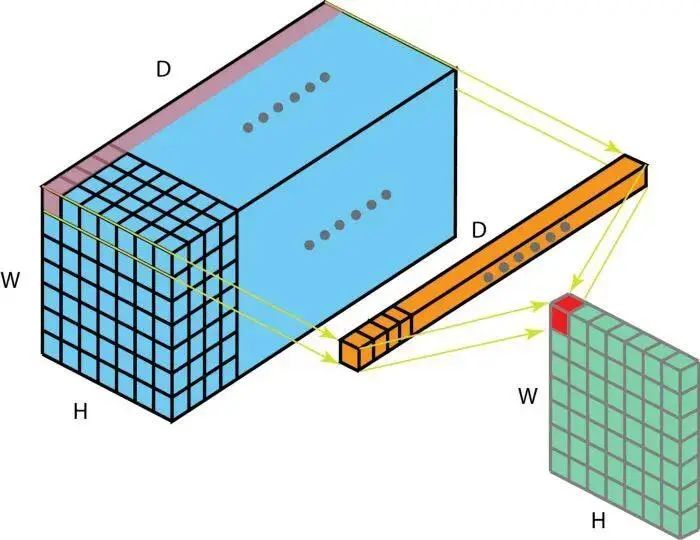
在一个维度为 H x W x D 的输入层上经过大小为 1 x 1 x D 的filters的 1 x 1 卷积,输出通道的维度为 H x W x 1。如果我们执行 N 次这样的 1 x 1 卷积,然后将这些结果结合起来,我们能得到一个维度为 H x W x N 的输出层。
通过将2D-卷积的推广,在3D-卷积定义为filters的深度小于输入层的深度(即卷积核的个数小于输入层通道数)
因此,3D-filters需要在三个维度上滑动(输入层的长、宽、高)。在filters上滑动的每个位置执行一次卷积操作,得到一个数值。当filters滑过整个3D空间,输出的结构也是3D的:
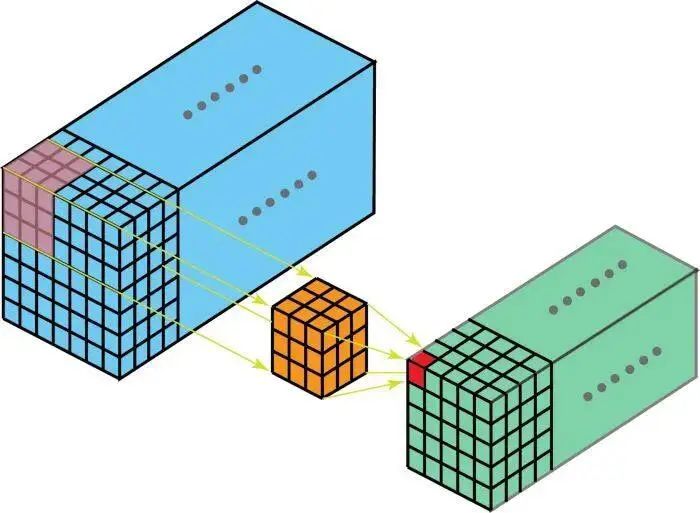
2D-卷积和3D-卷积的主要区别为filters滑动的空间维度,3D-卷积的优势在于描述3D空间中的对象关系,它的计算过程是:
卷积核的种类
除了普通的卷积操作外,也有一些变种,本文我们先介绍概念,对于每一种卷积的作用,我们会再出文章介绍。
- 转置卷积(反卷积)
一般正常卷积称为下采样,相反方向的转换称为上采样。转置卷积是相对正常卷积的相反操作,但它只恢复尺寸,因为卷积是一个不可逆操作。下面通过一个例子来说明转置卷积的具体操作过程。
假设一个3*3的卷积核,其输入矩阵是4*4的形状,经过步长为1,填充为0的卷积结果为:

转置卷积过程为,第一步,将卷积核矩阵重新排列为4*16形状:

第二步,将卷积结果重新排列为1维行向量:
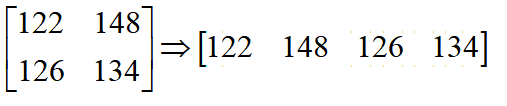
第三步,将重排矩阵转置后与行向量转置后相乘,得到16个元素的1维列向量:

第四步,对列向量进行重排为4*4的矩阵,得到最终结果:
这样就通过转置卷积将2x2的矩阵反卷为一个4x4的矩阵,但从结果也可以看出反卷积的结果与原始输入信号不同。只是保留了位置信息,以及得到了想要的形状。
- 空洞卷积(扩张卷积)
空洞卷积也叫扩张卷积,指的是在正常的卷积核的点之间插入空洞。它是相对正常的离散卷积而言的,对于步长为2,填充为1的正常卷积如下图:
插入空洞后,卷积过程变为:
空洞卷积通过空洞率(dilation_rate)控制,上图是空洞率为2的情况。
- 可分离卷积
可分离卷积分为空间可分离卷积和深度可分离卷积。
空间可分离卷积有个前提条件,就是卷积核可以表示为两个向量的乘积:
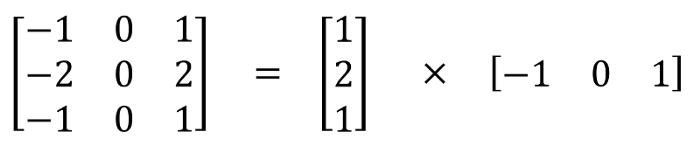
这样,3x1的kennel首先与图像进行卷积,然后应用1x3的kennel。在执行相同操作时,可以减少参数数量。所以,空间可分离卷积节省了成本,但是一般不使用它做训练,而深度可分离卷积是更常见的形式。
深度可分离卷积包括两个步骤:深度卷积和1*1卷积.下面是一个深度可分离卷积的例子:
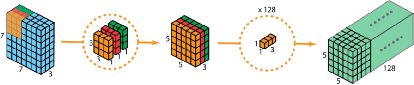
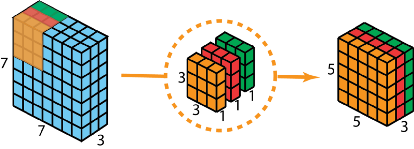
对于形状是7*7*3的输入层,有3个通道。
第一步在输入层上应用深度卷积。我们在2D-卷积中分别使用 3 个卷积核(每个filter的大小为3*3*1),每个卷积核仅对输入层的 1 个通道做卷积,这样的卷积每次都得到大小为5*5*1 的映射,之后再将这些映射堆叠在一起创建一个 5*5*3 的特征图:
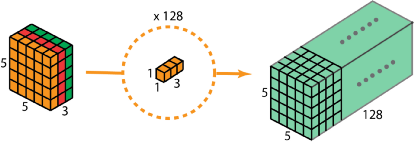
第二步进行扩大深度。我们用大小为1*1*3的卷积核做1x1卷积。每个卷积核对5*5*3输入图像做卷积后都得到一个大小为5*5*1的特征图,重复做128次1*1卷积,就得到了最终的结果:
从本质上说,深度可分离卷积就是3D卷积kernels的分解(在深度上的分解),而空间可分离卷积就是2D卷积kernels的分解(在WH上的分解)
- 分组卷积
分组卷积,顾名思义,filters被拆分为不同的组,每一个组都负责具有一定深度的传统 2D 卷积的工作。
比如下面这张图就展示了分组卷积的原理:
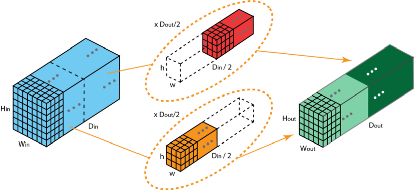
上图表示的是被拆分为 2 个filters组的分组卷积。在每一组中,其深度仅为传统2D-卷积的一半——Din/2,而每个filters组都包含Dout/2个filters。第一个filters组(红色)对输入层的前半部分做卷积([:,:,0:Din/2]),第二个filters组(蓝色)对输入层的后半部分做卷积([:,:,Din/2:Din])。最终,每个filters组都输出了Dout/2个通道。整体上,两个组输出的通道数为Dout ,之后,我们再将这些通道堆叠到输出层.
分组卷积有三个优点:有效的训练;模型参数随着filters组数的增加而减少;可以提供比标准2D卷积更好的模型。
参考资料:
https://www.zhihu.com/question/30888762
https://www.jianshu.com/p/1c9fe3b4dc55
版权声明
版权属于原作者,仅用于学术分享
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2024-07-13,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号