面向风场环境的能量最优无人机路径规划强化学习框架


面向风场环境的能量最优无人机路径规划强化学习框架
https://doi.org/10.1016/j.patcog.2025.112912
https://doi.org/10.1016/j.patcog.2025.112912
一、研究背景与问题提出
1.1 实际需求驱动
随着低空经济的发展,无人机(UAV)在物流配送、应急通信、环境监测等场景中广泛应用。然而,在低空复杂环境中(如城市峡谷、山区),无人机面临两大挑战:
- • 密集静态障碍物(建筑物、禁飞区等)
- • 不确定风扰(风速可达空速的40–50%,能耗增加超30%)
传统路径规划算法(如 A*、RRT、PRM)虽能生成无碰路径,但假设环境静态、成本函数固定,无法动态响应风场变化,导致:
- • 能耗高
- • 路径非最优
- • 任务失败风险上升
1.2 风场的双重性
风不仅是干扰源,也可被主动利用——如同滑翔机或候鸟借助尾风延长航程。因此,将风场信息融入路径规划,实现“顺风而行、避逆而走”,是提升能效的关键。
✅ 核心问题:如何在含风扰和障碍的环境中,为UAV规划一条能量消耗最小、安全可行的路径?
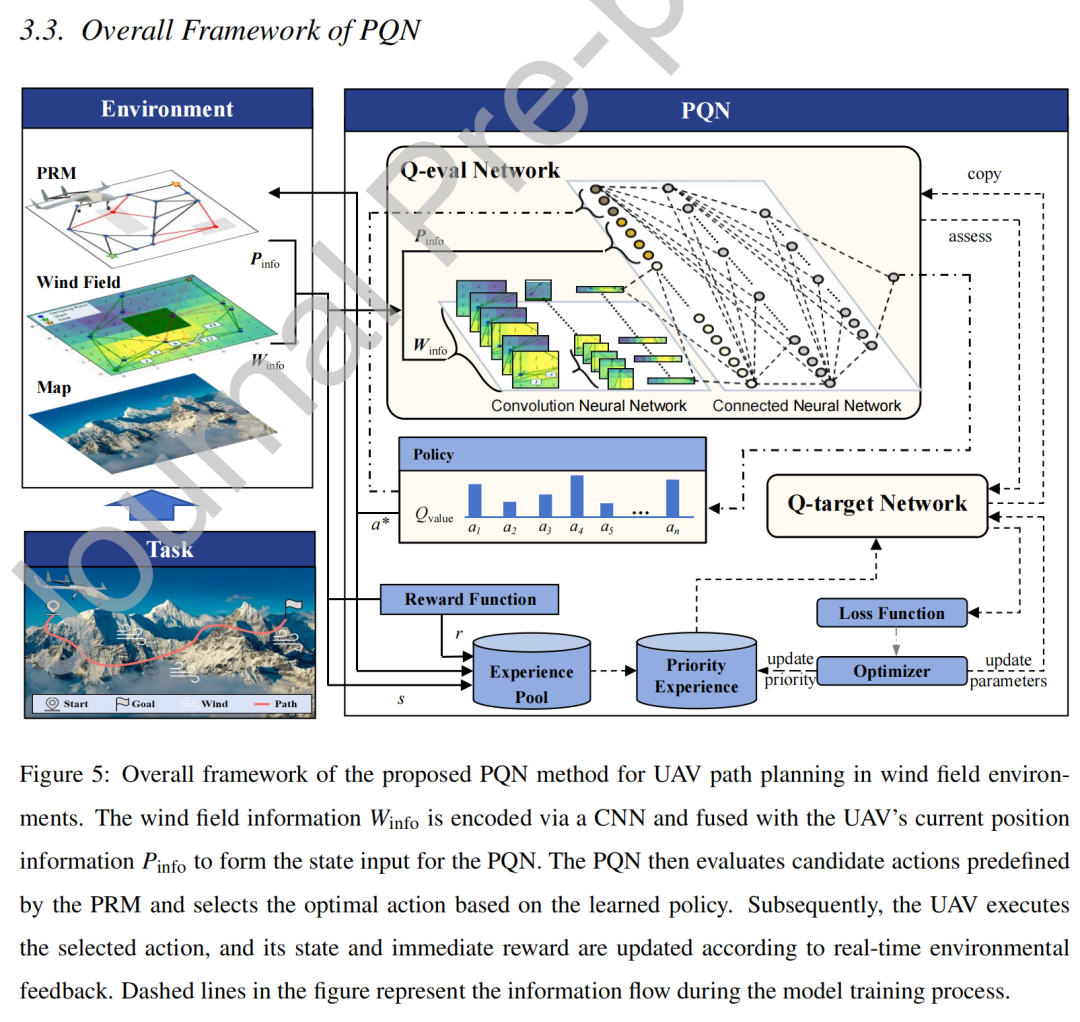
二、方法创新:PQN 框架
作者提出 Probabilistic Convolutional Q-Network (PQN),一个融合物理建模、图结构先验与深度感知的强化学习框架。
2.1 整体架构(三模块协同)
模块 | 功能 | 技术手段 |
|---|---|---|
能量模型 | 精确量化风对能耗的影响 | 基于空气动力学的物理模型(Eq. 12–13) |
CNN 编码器 | 提取全局风场特征 | 3层卷积 + 自适应池化 → 16维风特征向量 |
PRM 图构建 | 结构化动作空间,提升效率 | 随机采样 + K近邻连接 → 稀疏无碰图 |
💡 关键思想:用 PRM 将连续/高维动作空间离散为有限可行节点集,使 DRL 聚焦于“选哪个路点”,而非“往哪飞多少度”。
2.2 MDP 建模
- • 状态 s(t) = [当前位置 p(t), CNN 提取的风场特征 f_W]
- • 动作 a(t) = PRM 图中当前节点的邻居节点(即下一步路点)
- • 奖励 r(t) = β₁·Δd − β₂·E(t) − β₃·I_revisit + β₄·I_goal (鼓励靠近目标、惩罚能耗与重复访问,到达目标给大奖励)
- • 转移 P:确定性(执行动作即跳转到目标节点)
2.3 训练策略
- • 使用 DQN + Prioritized Experience Replay (PER)
- • 双网络结构(Q-network + Target network)稳定训练
- • ε-greedy 探索 + 重要性采样纠偏
三、关键技术细节
3.1 风场建模(Eq. 14–16)
采用复合风场模型:
- • 基础风:均匀方向与速度(V_base ∈ [0,5] m/s)
- • 涡旋扰动:多个高斯衰减涡流(模拟局部湍流)该模型既能反映宏观风向,又能刻画微观扰动,贴近真实大气。
3.2 能量消耗模型(Eq. 12–13)
在恒定地速、定高飞行假设下,推导出:
其中 是机体坐标系下的空速分量,受地速、风速、偏航角共同影响。 → 头风需更大油门 → 能耗↑;尾风则相反
3.3 PRM 参数选择(N=75, K=15)
通过消融实验发现:
- • N(采样点数)过少 → 图不连通;过多 → 计算冗余
- • K(近邻数)过小 → 局部最优;过大 → 训练慢最终平衡性能与效率,选定 N=75, K=15(10×10 网格)
四、实验设计与结果分析
4.1 对比方法
方法 | 是否含 CNN | 是否含 PRM |
|---|---|---|
DQN(基线) | ❌ | ❌ |
DQN + CNN | ✅ | ❌ |
PQN w/o CNN | ❌ | ✅ |
PQN(完整) | ✅ | ✅ |
4.2 主要结果(Table 5)
在10种随机风场下平均表现:
指标 | PQN(完整) | 相比 DQN 提升 |
|---|---|---|
能耗 | 261.3 kJ | ↓28.1% |
路径长度 | 1459.7 m | ↓16.0% |
规划时间 | 0.041 s | ↓74.2% |
训练时间 | 42.5 h | 更短(因动作空间小) |
✅ 结论:CNN 提供风感知能力 → 节能;PRM 压缩动作空间 → 加速。
4.3 消融实验(Figure 8 & Table 6)
- • 有 CNN 的 PQN:会主动绕远路进入强尾风区(即使几何路径更长,但总能耗更低)
- • 无 CNN 的 PQN:仅避障,易陷入局部强逆风区,能耗反超 A*
- • A*:无视风场,始终走最短几何路径 → 在复杂风场中次优
4.4 可扩展性(Table 8)
- • 网格从 10×10 → 50×50:
- • 路径长度基本不变(~1222 m)
- • 能耗 ↓10.8%(因风场分辨率更高,利用更精细)
- • 规划/训练时间 ↑(计算开销增大)
五、贡献总结
- 1. 提出物理一致的能量模型,准确刻画风-UAV 耦合关系;
- 2. 首次将 CNN 用于全局风场编码,使 RL 智能体具备“风感”;
- 3. 引入 PRM 结构化动作空间,兼顾可行性与计算效率;
- 4. 验证 PQN 在多种风场下的优越性,为实际部署提供依据。
六、局限与未来方向
作者坦诚指出:
- • 路径为离散路点序列,未考虑连续动力学约束(如最小转弯半径);
- • 未显式建模风突变下的安全裕度,可能引发碰撞;
- • 当前为2D 定高飞行,未拓展至 3D。
🔜 未来工作:
- • 引入轨迹平滑(如样条插值)
- • 结合鲁棒控制或安全 RL(如 WCSAC)
- • 扩展至动态障碍+时变风场
七、总体评价
该工作理论扎实、工程实用,巧妙融合了:
- • 经典机器人学(PRM)
- • 空气动力学(能耗建模)
- • 现代深度学习(CNN + DRL)
不仅解决了 UAV 能效问题,其“结构化动作空间 + 环境感知编码”的范式,亦可推广至水下机器人、自动驾驶等受环境场(洋流、交通流)影响的系统。
📌 一句话总结: PQN 让无人机学会“看风使舵”,走出一条又省电又安全的智慧航线。
END
声明:欢迎转载、转发。气象学家公众号转载信息旨在传播交流,其内容由作者负责,不代表本号观点。文中部分图片来源于网络,如涉及内容、版权和其他问题,请联系小编处理。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-12-18,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号